
Параметрические стабилизаторы
Параметрические стабилизаторы напряжения (ПСН) используются в маломощных ИВЭ (с выходным током до 15...20 мА), а также в качестве источников опорного напряжения в компенсационных стабилизаторах и контрольно-измерительной аппаратуре. Для стабилизации постоянного напряжения в них применяются элементы с нелинейной вольтамперной характеристикой, напряжение на которых мало зависит от протекающего через них тока. В качестве таких элементов используются полупроводниковые стабилитроны (диоды Зенера) и стабисторы.
Основная схема однокаскадного ПСН приведена на рис. 12.7, а. При изменении входного напряжения Ui ток Is через стабилитрон VD изменяется, что приводит к незначительным изменениям напряжения на стабилитроне, а следовательно, и на нагрузке. Изменение Uo зависит от приращения напряжения DUi, сопротивления ограничивающего резистора Ко и внутреннего сопротивления стабилитрона, равного Rs=dUs/dIs. Коэффициент стабилизации определяется по приближенной формуле: Kcт=(Uo/Ui)(Ro/Rs). Внутреннее сопротивление стабилизатора, определяемое в основном дифференциальным сопротивлением стабилитрона, достигает минимального значения для стабилитронов с напряжением стабилизации 6...8 В.

Температурный коэффициент напряжения Ктн стабилитрона определяет отклонение выходного напряжения ПСН при изменении температуры. Установлено, что наибольшая температурная зависимость наблюдается для приборов с напряжением стабилизации Us>5,5 В. Температурная компенсация в этом случае может быть достигнута включением последовательно со стабилитроном диодов в прямом направлении (VD2 и VD3 на рис. 12.7, б). Однако при этом возрастает внутреннее сопротивление ПСН за счет дифференциального сопротивления термокомпенсирую-щих диодов. Кроме того, термокомпенсированный ПСН имеет повышенное значение Us и пониженный коэффициент стабилизации.
Коэффициент стабилизации ПСН по схеме рис. 12.7, б равен Kcт=(UoRo)/Ui(Rs+Rs'), где Rs'— суммарное динамическое сопротивление термо-компенсирующих диодов VD2, VD3.
Если требуется повышенная стабильность выходного напряжения, то применяются двухкаскадные или мостовые схемы стабилизаторов, приведенные на
рис. 12.8 и 12.9. Коэффициент стабилизации ПСН по схеме рис. 12.8

где Rs, Rs' — динамические сопротивления стабилитронов VD1,VD2.
Предварительная стабилизация напряжения в двухкаскадном ПСН (рис. 12.8) с помощью элементов Ro и VD1 позволяет получить достаточно высокий коэффициент стабилизации выходного напряжения.

Повышение коэффициента стабилизации в мостовых схемах (рис. 12.9) достигается за счет компенсирующего напряжения на резисторе R2 или стабилитроне VD1 при изменениях входного напряжения. Коэффициент стабилизации при
Rn=const для схемы рис. 12.9,

Для ПСН на рис. 12.9, б

где Rs, Rs' — дифференциальные сопротивления стабилитронов VD1 и VD2. В мостовых параметрических стабилизаторах коэффициент стабилизации теоретически может быть бесконечно большим, если выбрать элементы, исходя из условий равенства нулю выражений в скобках. Внутреннее сопротивление для схемы на рис. 12.9, a Ri=Rs+R2, а для схемы на рис. 12.9, б Ri=Rs+Rs'.
Величина отклонения выходного напряжения мостовых схем ПСН при изменении температуры зависит от температурных коэффициентов стабилитронов, а для схемы на рис. 12.9, а еще и от температурных коэффициентов резисторов R1 и R2. Особенностью мостовой схемы на рис. 12.9, б является возможность получения низких выходных напряжений при небольшом температурном уходе за счет применения стабилитронов с мало отличающимися температурными коэффициентами.
Следует отметить, что относительно высокая стабильность выходного напряжения в ПСН на рис. 12.8 и 12.9 достигается за счет значительного ухудшения КПД по сравнению со схемой на рис. 12.7. Повысить стабильность выходного напряжения ПСН без ухудшения КПД позволяет схема на рис. 12.10 за счет применения источника тока, выполненного на транзисторе VT, стабилитроне VD1 и резисторах Re и Rb. Это позволяет стабилизировать ток, протекающий через стабилитрон VD2 и тем самым уменьшить нестабильность напряжения на нагрузке при изменениях входного напряжения. Температурный уход и внутреннее сопротивление этого ПСН практически такие же, как в схеме на рис. 12.10.
Максимальная выходная мощность рассмотренных ПСН ограничивается предельными значениями тока стабилизации и рассеиваемой мощностью стабилитронов. Если использовать транзистор в режиме эмиттерного повторителя со стабилитроном в цепи базы (рис. 12.11, а), мощность в нагрузке может быть увеличена. Коэффициент стабилизации такого ПСН

, а внутреннее сопротивление


— сопротивления базы, эмиттера, коллектора и коэффициент передачи тока транзистора в схеме с ОЭ соответственно.
Отметим, что ПСН по схеме рис. 12.11, а при Us>5,5 В по температурной нестабильности уступает рассмотренным выше стабилизаторам.

На рис. 12.11, б приведена схема ПСН на транзисторах различной проводимости, выполняющих роль стабилизаторов тока. Для него характерна высокая стабильность выходного напряжения и возможность одновременного подключения двух нагрузок Rn и Rn' к различным шинам входного напряжения. По коэффициенту стабилизации и температурному уходу эта схема незначительно превосходит схему на рис. 12.10, а внутренние сопротивления Rs и Rs' определяются стабилитронами VD1 и VD2 соответственно.
Моделирование рассмотренных стабилизаторов можно проводить двумя способами — с использованием на входе стабилизатора источника постоянного напряжения с имитатором источника пульсации или с использованием рассмотренных в предыдущем разделе выпрямителей. При этом последовательно со стабилитроном необходимо включить амперметр, а на выход стабилизатора — вольтметр. При наличии этих двух приборов можно определить дифференциальное сопротивление Rs=dUo/dIs в рабочей точке стабилитрона и затем рассчитать коэффициент стабилизации по приведенным формулам. Поскольку они справедливы только для ненагруженного стабилизатора, то сопротивление нагрузки Rn необходимо выбирать больше 100 кОм. Для наблюдения и измерения пульсации используется осциллограф.
Компенсационные стабилизаторы
В отличие от параметрических компенсационные стабилизаторы напряжения обеспечивают необходимую стабильность напряжения на нагрузке при помощи отрицательной обратной связи, воздействующей на регулирующий элемент (РЭ). В зависимости от схемы включения РЭ компенсационные стабилизаторы разделяются на последовательные и параллельные.
На рис. 12.12 приведена схема одного из наиболее распространенных (до появления интегральных стабилизаторов) транзисторных стабилизаторов напряжения последовательного типа. Стабилизатор состоит из регулирующего элемента (транзисторы VT1, VT2, VT3), усилителя постоянного тока (VTO, R1), источника опорного напряжения (VD, R2), делителя напряжения R3-R5, резисторов R6, R7, используемых для выбора режима по постоянному току транзисторов VT1, VT2, и конденсатора С1. В стабилизаторе предусмотрена регулировка выходного напряжения, для чего в состав делителя включен потенциометр R4.

Рис. 12.12. Компенсационный стабилизатор
Число транзисторов, входящих в регулирующий элемент, зависит от тока нагрузки. При 1п<(0,02...0,03) А можно использовать только один транзистор VT1; при (0,02...0,03) A<In<(0,5...0,6) A — два транзистора VT1,VT2; при (0,5...0,6) A<In<(4...5) A — все три транзистора.
Стабилизатор может быть выполнен на транзисторах типар—п—р или n—р—п. При использовании транзисторов типа р—п—р полярности напряжений на входе и выходе изменяются на противоположные (по сравнению со схемой на рис. 12.12). При этом необходимо также переключить стабилитрон VD, чтобы напряжение на его аноде было положительным относительно катода.
Стабилизатор работает следующим образом. При увеличении входного напряжения Ui увеличивается и выходное напряжение Uo, что вызывает увеличение напряжения на входе транзистора VTO и его коллекторного тока, в результате чего
напряжение на коллекторе уменьшается, а это вызывает уменьшение тока через транзисторы РЭ и, следовательно, приводит к пропорциональному уменьшению Uo. Аналогичные процессы происходят и при уменьшении тока нагрузки, что приводит к увеличению Uo. При уменьшении Ui или Uo (при увеличении тока нагрузки) транзистор VTO подзакрывается, напряжение на его коллекторе и на базе транзистора РЭ увеличивается, в результате чего Uo увеличивается почти до номинального значения.
Для проведения моделирования необходимо предварительно провести его приближенный расчет. Исходные данные для такого расчета: номинальное выходное напряжение Uo, В; пределы регулирования выходного напряжения Uomax — Uomin;
ток нагрузки 1нmax, А; минимальное и максимальное напряжение сети Uimax Uimin.
Примерный порядок предварительного расчета:
1. Определяем минимальное входное напряжение Uimin=Uomax+(4...5) В. Добавка 4...5 В требуется для обеспечения нормальной работы транзисторов РЭ. Максимальное Uimax в этом случае задается из условия максимально возможного напряжения сети.
2. В зависимости от тока нагрузки определяем число транзисторов, входящих в РЭ (см. вышеприведенную рекомендацию).
3. По Uimax-Uomax и 1nmax выбираются типы транзисторов или редактируются параметры выбранного библиотечного компонента по максимально допустимым напряжению и току коллектора.
4. Выбирается тип стабилитрона VD по напряжению стабилизации из условия Us=Uomin-(2...3) В. В этом случае сопротивление резистора R2=(2...3)/Ismin, где Ismin — минимальный ток стабилизации стабилитрона. Так, например, при Ismin=5 мА R2=400...600 Ом.
5. Определяется сопротивление резистора R1 из условия, что при напряжении Uimin-Uomax по нему протекает ток 3...5 мА.
6. Определяется суммарное Rs сопротивление резисторов делителя R3...R5 из условия протекания по нему тока 5...10 мА при номинальном напряжении Uo. При этом сопротивления резисторов делителя определяются из выражений:
R5=RsUs/Uomax R4=Rs/Uomin, R3=Rs-R4-R5.
7. Сопротивления резисторов R7, R6 определяются как Uo/Ibeo, где Ibeо — тепловой ток эмиттерного перехода соответствующего транзистора.
Рассмотренный стабилизатор обладает сравнительно небольшим коэффициентом стабилизации из-за малого коэффициента усиления однокаскадного усилителя постоянного тока (УПТ). Более высокими показателями обладают стабилизаторы с УПТ на ОУ, один из вариантов которого показан на рис. 12.13. В этом стабилизаторе опорный стабилитрон VD включен в верхнее плечо моста, одна диагональ которого присоединена к выходу стабилизатора, а вторая — ко входам ОУ. Выходное напряжение стабилизатора равно Uo=Us(R2+R3)/R3. Для защиты регулирующего транзистора VT1 от выхода из строя при коротком замыкании на выходе устройства введены транзистор VT2 и резисторы R4 и R5. При увеличении выходного тока выше допустимого предела падение напряжения на резисторе R5 (около 0,5 В) открывает транзистор VT2, в результате чего уменьшается выходное напряжение стабилизатора. При этом резистор R4 защищает выход ОУ от перегрузки при открытом VT2.
Для создания стабилизаторов переменного напряжения можно использовать такие же структурные схемы, что и в стабилизаторах постоянного напряжения, но источники опорного напряжения и регулирующие элементы в них должны быть, естественно, приспособлены для работы с переменным напряжением.
Что касается источников опорного переменного напряжения, то их обычно выполняют на основе инерционно-нелинейных сопротивлений — полупроводниковых или металлических терморезисторов. Регулирующие элементы, входящие в состав стабилизаторов, можно считать усилителями мощности, включенными на выходе ОУ. Таким образом, РЭ для переменного напряжения — это усилители мощности переменного напряжения.

В качестве примера на рис. 12.14 приведена схема простого стабилизатора переменного напряжения. Стабилизатор состоит из резистивного моста Rl, R2, R3, КО, к одной диагонали которого присоединяется источник входного переменного нестабилизированного напряжения Ui, а к другой — входы дифференциального усилителя. Резистор RO моста представляет собой маломощную лампу накаливания, т.е. металлический терморезистор, сопротивление которого возрастает за счет саморазогрева. Вследствие тепловой инерционности такого резистора его сопротивление не будет изменяться синхронно с изменением мгновенных значений тока, а будет реагировать только на относительно медленные изменения его действующего значения. К сожалению, модель лампы накаливания в программе EWB такими свойствами не обладает — это просто световой индикатор.
Контрольные задания
1. Проведите ориентировочный расчет транзисторного стабилизатора и его моделирование для определения коэффициента стабилизации. В процессе моделирования уточните номинальные значения пассивных компонентов и по необходимости отредактируйте параметры транзисторов и стабилитрона.
2. Выберите параметры компонентов и проведите моделирование стабилизатора с ОУ и сравните его коэффициент стабилизации с данными для транзисторного стабилизатора. Варьируя сопротивление нагрузки, проверьте работоспособность схемы защиты стабилизатора от коротких замыканий.
Импульсные стабилизаторы
Общим недостатком компенсационных стабилизаторов напряжения является низкий КПД из-за потерь в транзисторах регулирующего элемента, что, кроме того, требует мощных теплоотводов, значительно превышающих по габаритам и массе сами стабилизаторы. Более прогрессивным техническим решением являются импульсные стабилизаторы напряжения (ИСН), в которых транзисторы регулирующих элементов работают в ключевом режиме. При использовании высокочастотных транзисторов проблема КПД и массо-габаритных характеристик в таких стабилизаторах решается достаточно радикально.
Существуют три основные схемы ИСН [55]: последовательный ИСН понижающего типа (рис. 12.15), параллельный ИСН повышающего (рис. 12.16) и параллельный инвертирующего (рис. 12. 17) типа. Все три схемы содержат накопительный дроссель L, регулирующий элемент 1, блокировочный диод VD, элементы управления 2, 3 и конденсатор фильтра С.

Импульсный последовательный стабилизатор понижающего типа выполняется по структурной схеме, приведенной на рис. 12.15, в которой регулирующий элемент 1 и дроссель L включены последовательно с нагрузкой Rn. В качестве РЭ используется транзистор, работающий в ключевом режиме. При открытом в течение времени Т„ транзисторе энергия от входного источника постоянного тока Ui (или выпрямителя с выходным напряжением Uo) передается в нагрузку через дроссель L, в котором накапливается энергия. При закрытом в течение времени Тп транзисторе накопленная в дросселе энергия через диод VD передается в нагрузку. Период коммутации (преобразования) равен Т=Ти+Тп. Частота коммутации (преобразования) F=1/T. Отношение длительности открытого состояния транзистора, при котором генерируется импульс напряжения длительностью Ти, к периоду коммутации Т называется коэффициентом заполнения Кз=Ти/Т.
Таким образом, в импульсном стабилизаторе регулирующий элемент 1 преобразует (модулирует) входное постоянное напряжение Ui в серию последовательных импульсов определенной длительности и частоты, а сглаживающий фильтр, состоящий из диода VD, дросселя L и конденсатора С, демодулирует их в постоянное напряжение Uo. При изменении выходного напряжения Uo или тока в нагрузке Rn в импульсном стабилизаторе с помощью цепи обратной связи, состоящей из измерительного элемента 3 и схемы управления 2, длительность импульсов изменяется таким образом, чтобы выходное напряжение Uo оставалось неизменным (с определенной степенью точности).
Импульсный режим работы позволяет существенно уменьшить потери в регулирующем элементе и тем самым повысить КПД источника питания, уменьшить его массу и габариты. В этом состоит основное преимущество импульсных стабилизаторов перед компенсационными стабилизаторами непрерывного действия.
Импульсный параллельный стабилизатор (повышающего типа) выполняется по структурной схеме на рис. 12.16, в которой регулирующий элемент 1 подключен параллельно нагрузке Rn. Когда регулирующий транзистор открыт, ток от источника питания Ui протекает через дроссель L, запасая в нем энергию. Диод VD при этом находится в закрытом состоянии и поэтому не позволяет конденсатору С разрядиться через открытый регулирующий транзистор. Ток в нагрузку в этот промежуток времени поступает только от конденсатора С. В момент времени, когда регулирующий транзистор закрывается, ЭДС самоиндукции дросселя L суммируется с входным напряжением и энергия дросселя передается в нагрузку, при этом выходное напряжение оказывается больше входного напряжения питания Ui. В отличие от схемы на рис. 12.15 здесь дроссель не является элементом фильтра, а выходное напряжение становится больше входного на величину, определяемую индуктивностью дросселя L и временем открытого состояния регулирующего транзистора (или скважностью управляющих импульсов).
Схема управления стабилизатором на рис. 12.16 построена таким образом, что, например, при повышении входного напряжения питания Ui уменьшается длительность открытого состояния регулирующего транзистора на такую величину, что выходное напряжение Uo остается неизменным.
Импульсный параллельный инвертирующий стабилизатор выполняется по структурной схеме, приведенной на рис. 12.17. В отличие от схемы на рис. 12.16 здесь дроссель L включен параллельно нагрузке Rn, а регулирующий элемент 1 — последовательно с ней. Блокирующий диод отделяет конденсатор фильтра С и нагрузку Rn от регулирующего элемента по постоянному току. Стабилизатор обладает свойством изменения (инвертирования) полярности выходного напряжения Uo относительно полярности входного напряжения питания.
Импульсные стабилизаторы в зависимости от способа управления регулирующим транзистором могут выполняться с широтно-импульсной модуляцией (ШИМ), частотно-импульсной модуляцией (ЧИМ) или релейным управлением. В ШИМ-ста-билизаторах в процессе работы изменяется длительность импульса Ти, а частота коммутации остается неизменной; в ЧИМ-стабилизаторах изменяется частота коммутации, а длительность импульса Ти остается постоянной; в релейных стабилизаторах в процессе регулирования напряжения изменяется как длительность импульсов, так и частота их следования.
Наибольшее распространение на практике получил последовательный ИСН (рис. 12.15), в котором накопительный дроссель одновременно является элементом сглаживающего LC-фильтра. В стабилизаторах на рис. 12.16 и 12.17 дроссель L не участвует в сглаживании пульсации выходного напряжения. В этих схемах сглаживание пульсации достигается только за счет увеличения емкости конденсатора С, что приводит к увеличению массы и габаритов фильтра и устройства в целом.
Статическая регулировочная характеристика, определяемая для стабилизатора на рис. 12.15 по формуле Uo/Ui=Kз (1 — Кг), представляет собой прямую, наклон которой зависит (без учета потерь в регулирующем транзисторе и диоде) от отношения активных сопротивлений дросселя и нагрузки Kг=Rd/Rn. Напряжение Uo на нагрузке определяется относительной длительностью управляющих импульсов (при постоянном Ui) и не может быть больше напряжения питания, а линейность данной характеристики соответствует условиям устойчивой работы ИСН.
Рассмотрим основные элементы ИСН на рис. 12.15. Начнем с основного блока, схема которого показана на рис. 12.18.
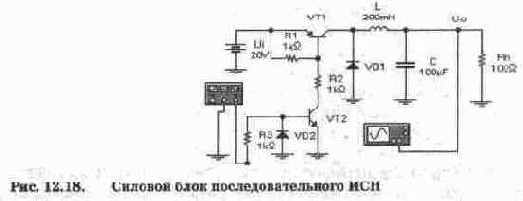
Блок включает в себя силовую часть и регулирующий элемент на транзисторе VT1, управляемый ключом на транзисторе VT2 (диод VD2 служит для защиты базового перехода VT2 при большом отрицательном входном сигнале управления). Сопротивление резистора R1 выбирается из условия обеспечения закрытого состояния транзистора VT1 (100...900 Ом), a R2 — ориентировочно из условия kbUi=R2 Ikmax где k=l,5...2 — коэффициент запаса по насыщению; b, Ikmax — коэффициент усиления тока и максимальный импульсный коллекторный ток транзистора VT1. Аналогичным образом выбирается сопротивление резистора R3, но при этом в расчетах Ui заменяется амплитудой управляющего импульса функционального генератора. Отметим, что при выборе количества транзисторов РЭ можно руководствоваться рекомендациями, приведенными для схемы на рис. 12.12.
Исходными данными для выбора параметров схемы на рис. 12.18 являются:
напряжение Ui и пределы его изменения; внутреннее сопротивление Ri источника Ui; номинальное выходное напряжение стабилизатора Uo и допустимые пределы его регулировки; максимальный Inmax и минимальный Imin токи нагрузки, допустимая амплитуда пульсации выходного напряжения стабилизатора; коэффициент стабилизации Кn и внутреннее сопротивление Ro; максимальный температурный уход напряжения Uo и др. Порядок выбора параметров следующий:
1. Выбираем частоту преобразования F (до 100 кГц, для модели — единицы килогерц) и принимаем ориентировочно КПД=0,85...0,95.
2. Определяем минимальное и максимальное значения относительной длительности (коэффициента заполнения) импульса напряжения на входе фильтра:

3. Из условия сохранения режима непрерывности токов дросселя определяем его
минимальную индуктивность

4. Вычисляем произведение LC по заданному значению напряжения пульсации U„

откуда затем находим емкость конденсатора С.
Произведение LC определяет не только уровень пульсации, но и характер переходных процессов выходного напряжения после включения стабилизатора.
На рис. 12.19 показаны результаты моделирования схемы на рис. 12.18 при следующих данных: F=1 кГц, К,=0,5, Rn=100 Ом, L=200 мГн, С=100 мкФ (для рис. 12.19, а) и С=1 мкФ (для рис. 12.19, б). Как видно из рисунков, при сравнительно большом значении произведения LC переходная характеристика исследуемой схемы имеет колебательный характер, что приводит к скачкам выходного напряжения, которые могут оказаться опасными для потребителя (нагрузки).

Перейдем к рассмотрению следующего функционального узла ИСН — схемы управления и измерительного элемента. При этом целесообразно рассмотреть характеристики используемых в ИСН модуляторов.
Импульсные стабилизаторы с ШИМ по сравнению со стабилизаторами двух других типов имеют следующие преимущества:
О обеспечивается высокий КПД и оптимальная частота преобразования независимо от напряжения первичного источника питания и тока нагрузки; частота пульсации на нагрузке является неизменной, что имеет существенное значение для ряда потребителей электроэнергии;
О реализуется возможность одновременной синхронизации частот преобразования неограниченного числа ИСН, что исключает опасность возникновения биений частот при питании нескольких ИСН от общего первичного источника постоянного тока. Кроме того, при работе ИСН на нерегулируемый преобразователь (например, усилитель мощности) возможна синхронизация частот обоих устройств.
Недостатком ИСН с ШИМ по сравнению со стабилизатором релейного типа является более сложная схема управления, содержащая обычно дополнительный задающий генератор.
Импульсные стабилизаторы с ЧИМ, не имея существенных преимуществ перед другими типами ИСН, обладают следующими недостатками:
О сложность реализации регуляторов частоты в широких пределах, особенно при больших изменениях напряжения питания и тока нагрузки;
О отсутствие возможности реализации отмеченных выше преимуществ системы регулирования с ШИМ.
Последний недостаток относится и к релейным (или двухпозиционным) ИСН, которые характеризуются также сравнительно большой пульсацией напряжения на нагрузке (в стабилизаторах с ШИМ или ЧИМ пульсации выходного напряжения принципиально могут быть сведены к нулю, что невозможно достичь в релейных стабилизаторах).
В общем случае блок 3 (рис. 12.20) содержит делитель напряжения, источник опорного напряжения ИОН, сравнивающий элемент и усилитель рассогласования. Эти элементы выполняют такие же функции, что и в компенсационных стабилизаторах. Для ИСН с ШИМ к этим устройствам добавляются формирователь синхронизирующего напряжения (задающий генератор) и пороговое устройство, с помощью которых осуществляется формирование модулированных по длительности импульсов. Изменение длительности управляющего импульса осуществляется модуляцией его переднего или заднего фронта.

При модуляции переднего фронта линейно изменяющееся напряжение синхронизации на каждом периоде нарастает, а при модуляции заднего фронта управляющее напряжение в каждом периоде уменьшается. При модуляции фронтов напряжение синхронизации на каждом периоде нарастает и спадает. Этот вид модуляции по сравнению с односторонней модуляцией позволяет реализовать более быстродействующие ИСН, так как в этом случае мгновенное значение управляющего напряжения влияет на формирование фронтов.
Коэффициент передачи схемы управления, устанавливающий связь между изменениями относительной длительности импульсов на входе сглаживающего фильтра и напряжения на нагрузке (для ШИМ), равен

коэффициенты передачи делителя напряжения и усилителя рассогласования соответственно; Uy — амплитуда синхронизирующего напряжения.
Полная схема ИСН с элементами ШИМ показана на рис. 12.20. Делитель напряжения выполнен на резисторах R3, R4, источник опорного напряжения — на резисторе R5 и стабилитроне VD2, усилитель сигнала рассогласования — на OU1, пороговое устройство — на OU2. Поскольку оба ОУ питаются от однополярного источника, для согласования уровней в ключевом каскаде на VT2 в эмиттерную цепь включен параметрический стабилизатор (VD3, R8). В качестве задающего использован функциональный генератор в режиме треугольных импульсов; при модуляции по переднему фронту коэффициент заполнения (Duty cycle) выбирается максимальным (99%), при модуляции по заднему фронту — минимальным (0,1%), при модуляции по обоим фронтам — 50%. На рис. 12.21 показан результат моделирования процесса формирования управляющих импульсов при модуляции по переднему фронту.

Приведенные на рис. 12.21 результаты получены при Rn=100 Ом и Ui = 20 В. Как видно из рис. 12.21, сразу после включения источника питания формируются импульсы управления максимальной длительности, затем наступает продолжительная пауза из-за положительного скачка выходного напряжения Uo, затем опять идетт форсированный режим из-за отрицательного скачка Uo. Установившийся режим формирования управляющего импульса наступает через несколько периодов управляющего сигнала задающего генератора.
Контрольные задания
1. Для схемы на рис. 12.18 получите зависимость Uo=f(K,) при F=1 кГц, Uy=3 В (однополярность управляющих прямоугольных импульсов обеспечивается установкой на функциональном генераторе постоянной составляющей Offset=3 В, коэффициент заполнения К. задается выбором параметра Duty cycle), Ui=30 В, Rn=100 Ом, L=100 мГн, С=100 мкФ.
2. Для схемы на рис. 12.18 исследуйте зависимость формы переходных процессов от активного сопротивления потерь Rd включая последовательно с дросселем сопротивление 0,1... 10 Ом.
3. Исследуйте ИСН по схеме рис. 12.20 при модуляции заднего фронта, одновременно по переднему и заднему фронту и сравните результаты по времени выхода устройств в установившийся режим.
4. Для каждого способа формирования управляющих сигналов в установившемся режиме получите зависимость периода формирования управляющих сигналов от сопротивления нагрузки Rn в диапазоне 10... 1000 Ом и входного напряжения Ui в диапазоне 15...40 В.
Транзисторные преобразователи
При использовании в качестве первичных источников питания таких источников постоянного тока, как аккумуляторы, солнечные батареи и т.п., транзисторный преобразователь является основным функциональным узлом преобразования входного напряжения постоянного тока одного номинала в ряд постоянных напряжений различных номиналов и полярностей, гальванически не связанных друг с другом и с первичным источником. Транзисторный преобразователь применяется также в источниках питания с бестрансформаторным входом, работающих от сети переменного тока промышленной частоты. Такие источники питания в настоящее время полностью вытеснили громоздкие трансформаторные устройства из бытовой радиоаппаратуры, персональных компьютеров и других приборов различного назначения.
Транзисторные преобразователи выполняются по однотактной или двухтактной схеме. Однотактные преобразователи выполняются по схеме релаксационного автогенератора с трансформаторной обратной связью (рис. 12.22, а), преобразующего постоянное напряжение питания Ucc в прямоугольные импульсы; выходное напряжение Uo, получаемое на вторичной обмотке трансформатора Т, выпрямляется и после фильтрации подается на стабилизатор и далее потребителю.

Двухтактный преобразователь выполняется, как правило, на двух транзисторах, к коллекторам которых подключена первичная обмотка трансформатора. Источник питания Ucc подключается к эмиттерам транзисторов и среднему выводу первичной обмотки трансформатора Т (рис. 12.22, б). Трансформатор содержит также две обмотки, подключаемые к базам транзисторов и обеспечивающие режим автогенерации за счет положительной обратной связи.
В двухтактных автогенераторных преобразователях используются трансформаторы в режиме насыщения или ненасыщения. В преобразователях с силовым трансформатором в режиме насыщения переключение транзисторов осуществляется за счет смены полярности напряжения на обмотках трансформатора в момент насыщения сердечника. В этих преобразователях цепь обратной связи (базовые обмотки, обмотка Wb на рис. 12.22, а) находится на общем магнитопроводе трансформатора питания. Частота преобразования определяется параметрами трансформатора и напряжением на его первичной обмотке. Основным недостатком таких преобразователей является резкое увеличение тока через открытый транзистор в момент его насыщения, что вызывает дополнительные потери мощности в транзисторах.
В преобразователях с ненасыщающимся трансформатором переключение транзистора осуществляется за счет введения в цепь обратной связи дополнительных элементов, которые переключают транзистор до насыщения трансформатора. В качестве таких переключающих элементов могут использоваться маломощный переключающий трансформатор, дроссель насыщения или RC-цепи (параллельно резисторам Rb, Rbl, Rb2 подключаются конденсаторы).
Двухтактные преобразователи ввиду их простоты и высокой надежности широко используются в источниках питания с выходной мощностью до нескольких десятков ватт. В более мощных преобразователях дополнительно используются двухтактные или мостовые усилители на транзисторах большой мощности. В качестве задающего генератора, который управляет переключением силовых транзисторов усилителя мощности, используются двухтактные преобразователи с самовозбуждением, автогенераторы на операционных усилителях или логических элементах с внешними RC-цепями, задающими частоту преобразователя до 200 кГц и выше.
Достоинством преобразователей с усилителем мощности является отсутствие влияния изменения нагрузки и напряжения питания на частоту преобразования; в них также просто организуется управление силовыми транзисторами.
На практике получили также распространение преобразователи с дополнительным стабилизатором напряжения на входе. При этом в зависимости от выходной мощности применяются различные типы стабилизаторов. Преобразователи с входным непрерывным стабилизатором используются при выходной мощности от долей до единиц ватт, КПД такого преобразователя не выше 0,5. Преобразователи с входным импульсным стабилизатором используются при выходной мощности от единиц до сотен ватт; они имеют более высокий КПД — до 0,6...0,8.
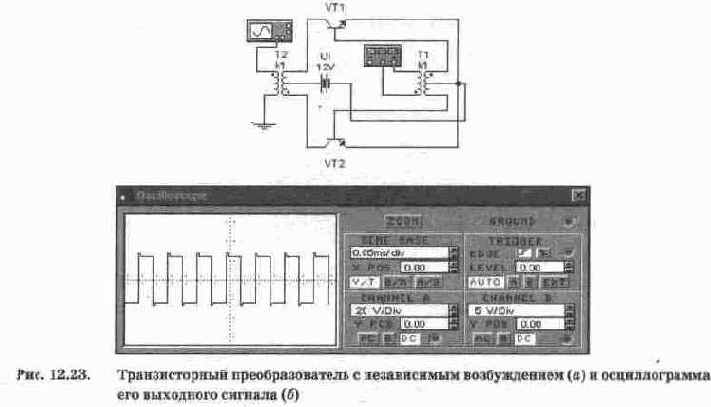
Схема преобразователя с усилителем мощности (преобразователь с независимым возбуждением) приведена на рис. 12.23, а. Преобразователь содержит два транзистора VT1, VT2, выходной Т1 и входной Т2 трансформаторы, между средними точками обмоток которых включен источник преобразуемого постоянного напряжения Ui. В качестве задающего генератора использован функциональный генератор в режиме синусоидального сигнала напряжением 3 В. Выходной сигнал этого преобразователя показан на рис. 12.23, б.
компоненты импульсных стабилизаторов находятся
В программе EWB 5. 0 компоненты импульсных стабилизаторов находятся в группе Miscellaneous под именами BUCK, BOOST и BUCK-BOOST. В документации на программу приводятся схемы включения первых двух компонентов с результатами моделирования в таком включении (рис. 12.24). Компоненты имеют два входа и один выход. К первому входу подключается источник входного напряжения Ui (12 и 5 В), ко второму входу подключается источник управления Uc (0,1 В), напряжение которого может меняться в пределах от 0,1 до 0,9 В, что соответствует изменению коэффициента заполнения D импульсов встроенного генератора в пределах от 10 до 90%. При этом выходное напряжение компонентов должно меняться в соответствии с выражениями [67]:
для компонента BUCK

для компонента BOOST

где Ui — входное напряжение.

Из анализа данных на рис. 12.24 видно, что результаты моделирования практически соответствуют результатам расчета по приведенным формулам. Кроме того, можно сделать вывод, что компонент BUCK является моделью импульсного стабилизатора напряжения понижающего типа, структурная схема которого приведена на рис. 12.15, а компонент BOOST — моделью импульсного стабилизатора напряжения повышающего типа, структурная схема которого приведена на рис. 12.16.
В диалоговом окне, которое является одинаковым для всех трех компонентов, можно задать (см. рис. 12.25) индуктивность накопительного дросселя, его активное сопротивление и частоту преобразования встроенного генератора.

Рассмотрим возможность использования источников напряжения, управляемых напряжением (ИНУН), программы EWB 5.0 в качестве широтно-импульсного модулятора (ШИМ) для ИСН. Схема такого модулятора (рис. 12.26) содержит управляемый источник VT, источник испытательного напряжения на интеграторе (элементы ОУ1, R, С) с источниками постоянного напряжения Ul, U2 на входе, переключаемыми реле времени 1. Этот источник генерирует однополярный треугольный импульс, который через переключатель X, управляемый одноименной клавишей клавиатуры, может подключаться к каналу А осциллографа и через ключ Z — ко входу "+" ИНУН. В качестве задающего источника используется функциональный генератор, работающий в режиме генерации однополярных импульсов с коэффициентом заполнения 2%. Выход генератора подключен ко входу запуска "П" ИНУН (триггерный вход). Вход разрешения "С" ИНУН через реле времени 2 с временем задержки 4 с может подключаться или к общей шине (разрешение) или к источнику U1(запрет). Источник напряжения U3 предназначен для получения

характеристики преобразования "вручную", для чего ключ Z переводится в противоположное показанному на рисунке положение.
Параметры ИНУН задаются с помощью диалогового окна, имеющего две закладки (рис. 12.27). Параметр CLKTR определяет минимальную амплитуду запускающих сигналов (чувствительность по запуску), параметры L и Н — нижний и верхний уровень выходного напряжения, параметры DTR и DPW — временную задержку (относительно сигналов запуска) формирования выходного импульса и его ширины, параметры TR и TF — длительность переднего и заднего фронта выходного импульса. Параметр N определяет количество задаваемых участков по входному напряжению С1...С5, в которых длительность (ширина) выходного импульса будет равна соответственно установленной длительности PW1...PW5.
Результаты моделирования схемы на рис. 12.26 при значениях параметров, указанных на рис. 12.27, показаны на рис. 12.28, откуда видно, что при входном напряжении около 5 В (результаты измерений в строках VA1, VA2 индикаторных окон) длительность выходного импульса (результаты измерений в строке Т2-Т1 индикаторного окна) составляет 50 мс, что соответствует заданному значению. Таким образом, коэффициент преобразования (крутизна характеристики преобразования) ШИМ на рис. 12.28 составляет 10 мс/В. Для входных сигналов напряжением меньше 1 В осциллограммы в "увеличенном" масштабе (при более быстрой развертке) показаны на рис. 12.29. На рис. 12.30 приведены осциллограммы сигналов, аналогичные показанным на рис. 12.28, но при длительности сигнала разрешения 1,5с (после срабатывания реле времени 2, когда на вход разрешения "С" подается запрещающий сигнал положительной полярности от источника U1).

Если поменять местами значения параметров PW1 и PW2, то осциллограммы сигналов на рис. 12.30 приобретают вид, показанный на рис. 12.31, откуда видно, что с увеличением уровня входного сигнала длительность выходных импульсов уменьшается и при входном напряжении больше 5 В наблюдается пропадание выходного сигнала.

Контрольные вопросы и задания
1. Исследуйте зависимость .Uo=f(Uc) в диапазоне Uc=0,01...0,95 В при указанных на рис. 12.24 значениях Ui.
2. Объясните, почему при напряжении входного сигнала больше 5 В на осциллограмме рис. 12.31 наблюдается пропадание выходного сигнала?
3. Измерьте коэффициент преобразования ШИМ (рис. 12.26) при входных напряжениях 0,5...3 В, используя для этой цели источник напряжения U3.
4. Что нужно предпринять, чтобы устранить пропадание выходного сигнала, показанное на рис. 12.31? Ответ проверьте на модели.
Источники электропитания
Электропитание радиоэлектронной аппаратуры (РЭА) осуществляется от различных источников постоянного или переменного тока. Самый распространенный способ электропитания от сети переменного тока предполагает использование выпрямителей, сглаживающих фильтров и стабилизаторов напряжения или тока.
12.1. Выпрямители и сглаживающие фильтры
12.2. Параметрические стабилизаторы
12.3. Компенсационные стабилизаторы
12.4. Импульсные стабилизаторы
12.5. Транзисторные преобразователи
12.6. Элементы импульсных стабилизаторов в программе EWB 5.0
Принципы построения приемо-передающих устройств
Блок-схема типового супергетеродинного радиоприемника показана на рис. 13.1, на котором обозначено: А — антенна, 1 — входное устройство, 2 — усилитель высокой частоты, 3 — преобразователь частоты, 4 — гетеродин, 5 — усилитель промежуточной частоты, 6 — детектор, 7 — второй гетеродин, 8 — усилитель низкой частоты, Gr — громкоговоритель. Отметим, что второй гетеродин 7 используется только в профессиональных приемниках для слухового телеграфного приема, в радиовещательных приемниках он обычно не используется.

Для ознакомления с основными принципами построения приемо-передающих устройств рассмотрим демонстрационную модель одного из таких устройств, содержащуюся в каталоге программы EWB 4.1 (схемный файл molditi.on.ca4) и показанную в несколько переработанном виде на рис. 13.2. В схеме использованы следующие подсхемы (субблоки): carrier — генератор несущей частоты, modultr — амплитудный модулятор, А — зажим антенны, prop-sky — аттенюатор, имитирующий потери в антенне и входном устройстве приемника, receiver — приемник.
Схема генератора несущей в развернутом виде показана на рис. 13.3. Это знакомая нам схема с мостом Вина (см. гл. 10), отличающаяся наличием делителя выходного напряжения на резисторах R3, R4 и другой частотой колебаний — 3,3 кГц. Такая частота относится к диапазону звуковых частот и, конечно, в радиопередатчиках не используется, но здесь речь идет о принципе работы и при необходимости повышения частоты в разумных пределах особенных проблем не возникает.
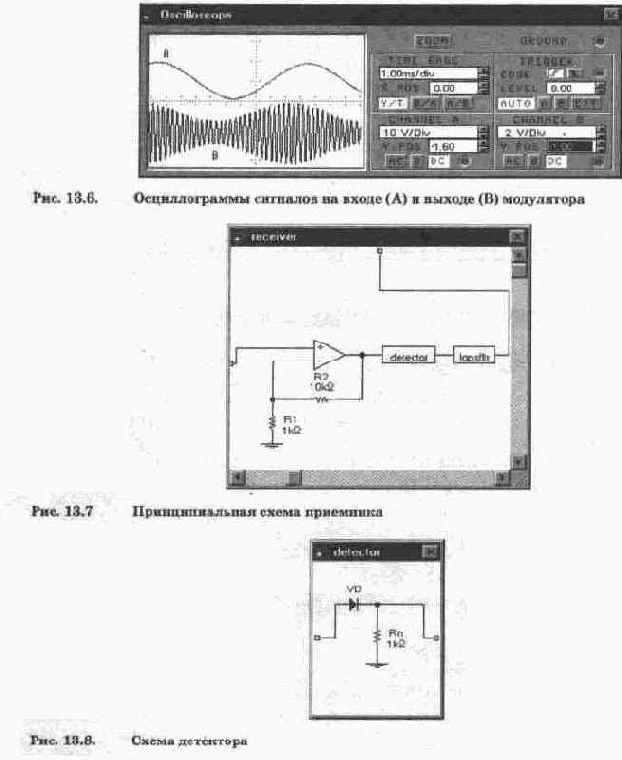
Схема модулятора показана на рис. 13.4. Он выполнен на ОУ, в цепь ООС которого включен собственно модулирующий элемент — полевой транзистор VT в режиме регулируемого сопротивления. Напряжение от генератора поступает на неинвертирующий вход ОУ, а модулирующее напряжение — на затвор полевого транзистора, режим которого по постоянному току задается постоянной составляющей напряжения на выходе функционального генератора (рис. 13.5). На выходе модулятора получаем амплитудно-модулированное колебание, осциллограмма которого показана на рис. 13.6.

Аттенюатор представляет собой делитель на двух резисторах 10 и 1 Ом и обеспечивает ослабление в 11 раз (примерно на 21 дБ). Схема его настолько очевидна, что не имеет смысла приводить ее здесь.
Схема приемника в целом показана на рис. 13.7. Он содержит усилитель амп-литудно-модулированных колебаний (в реальных приемниках его называют усилителем радиочастоты или усилителем высокой частоты) на ОУ с коэффициентом усиления 1+R2/R1=11 и две подсхемы: detector — детектор (рис. 13.8) и lopsfltr — фильтр. Как видно из рис. 13.8, детектор представляет собой простой однополупери-одный выпрямитель.
Показанный на рис. 13.9, а фильтр представляет собой активный фильтр высокой частоты на ОУ. На частоте модуляции (100 Гц) коэффициент передачи равен 1+КЗ/К4=1,2, в то время как для частоты несущей (3,3 кГц) он существенно меньше. На выходе фильтра получаем сигнал (рис. 13.9, б), переданный с помощью при-емо-передающей системы на рис. 13.2. Таким образом, в результате моделирования достаточно наглядно продемонстрированы основные принципы приемно-передаю-щего устройства.

Контрольные вопросы и задания
Вопросы составлены с учетом сведений, приведенных в Приложении 3.
1. Скопируйте подсхему фильтра lopsfltr в отдельный файл и исследуйте его АЧХ иФЧХ.
2. Чем отличается детекторный приемник от приемника прямого усиления и как можно объяснить название последнего?
3. Какими преимуществами обладает супергетеродинный приемник по сравнению с приемником прямого усиления?
4. Определите коэффициент модуляции показанного на рис. 13.6 AM колебания.
5. Какими элементами схемы модулятора на рис. 13.4 можно изменять коэффициент модуляции? Проверьте свой ответ на модели.
6. По приведенному выше описанию аттенюатора подготовьте его схему и сверьте ее с моделью.
Входные устройства, радиоприемных устройств
Входные устройства (ВУ, их называют еще преселекторами) радиоприемных устройств представляют собой резонансную систему, схема которой определяется типами связи с антенной и с первым каскадом приемника (рис. 13.10).
Входное устройство по схеме рис. 13.10, а рассчитано на применение в первом каскаде приемника резонансного усилителя с достаточно высоким входным сопротивлением (каскад на полевом транзисторе), катушка L1 в этом случае носит название катушки связи, если L1 и L2 намотаны на одном каркасе.
Входное устройство на рис. 13.10, б характерно для приемников с магнитной антенной и возможностью подключения дополнительно внешней антенны (через конденсатор Са) при трансформаторной связи с первым каскадом приемника. Отметим, что с целью минимизации влияния входного сопротивления этого каскада на избирательные характеристики резонансного контура емкость конденсатора связи Са с антенной выбирается достаточно малой.
Входное устройство на рис. 13.10, в является наиболее простым и широко используемым практически на всех диапазонах; при необходимости согласования со входным каскадом приемника от катушки L делается отвод, который подключается ко входному каскаду (автотрансформаторная связь с нагрузкой).


Рассмотрим эквивалентную схему ВУ с трансформаторно-емкостной связью с антенной на рис. 13.11, на котором обозначено: La, Caa, Ra — эквивалентная индуктивность, емкость и активное сопротивление антенны, Em — ЭДС, наводимая в антенне.
Как правило, в диапазоне частот вплоть до ультракоротких волн индуктивное и активное сопротивление антенны значительно меньше емкостного [55], что позволяет упростить схему на рис. 13.11 и привести ее к виду, показанному на рис. 13.12, на котором Со=Саа-Са/(Саа +Са); Le — индуктивность рассеяния первичной обмотки трансформатора (устанавливается в диалоговом окне параметров трансформатора); Сn'=n2Cn — приведенная к первичной обмотке емкость нагрузки Cn [50], где n — коэффициент трансформации, задаваемый в окне параметров трансформатора. Сопротивление Rk, состоит из активного сопротивления первичной обмотки трансформатора Rp, которое устанавливается в окне его параметров и по умолчанию равно нулю, и эквивалентного сопротивления нагрузки Rn'=n2Rn [50], пересчитанному параллельно контуру. Для преобразования его в последовательно включенное, что более удобно для дальнейшего анализа, используется формула



Поскольку, как указывалось выше, емкость конденсатора связи Са выбирается достаточно малой, ток, поступающий в параллельный колебательный контур, образованный элементами Сn', С, Le, L1 и Rn', равен

При резонансе ток Im' в индуктивной или емкостной ветви параллельного колебательного контура равен [56]

где

После подстановки (13.1) в (13.2) получим

Напряжение на первичной обмотке трансформатора

Напряжение на выходе устройства (на вторичной обмотке трансформатора)

, Следовательно, коэффициент передачи входного устройства равен

Пренебрегая индуктивностью рассеяния, т.е. выбирая в окне параметров трансформатора Le=0, рассмотрим два случая:
1) активное сопротивление первичной обмотки Rp = О;
2) активное сопротивление значительно больше эквивалентного сопротивления нагрузки.
В первом случае


Во втором случае Rp>>Rp' следовательно, Rk=Rp и


Перейдем к моделированию ВУ, показанного на рис. 13.13, а, для которого приняты следующие значения параметров трансформатора: Rp=0 и п=3. При остальных параметрах, указанных на схеме, расчеты по формуле (13.4) дают

Результаты моделирования показаны на рис. 13.13, б, откуда видно, что коэффициент передачи составляет -41,6 дБ, что весьма близко к расчетному. Отметим, что расчетное значение резонансной частоты — 2,9 кГц — также близко к полученному при моделировании.
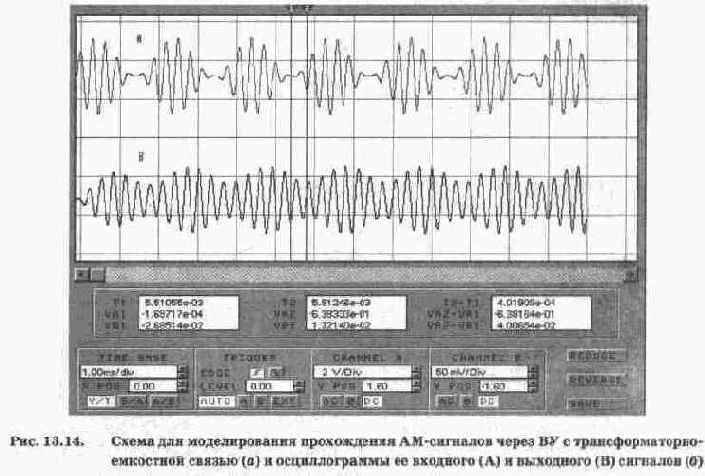
Перейдем к рассмотрению процесса прохождения через ВУ (рис. 13.14, а) АМ-сигналов. При моделировании используется источник АМ-сигнала

где Еm — амплитуда несущей; М<1 — коэффициент модуляции;
Переключатель Z позволяет подключиться к функциональному генератору для оперативного получения АЧХ входного устройства.
Как видно из выражения (13.6), спектр АМ-сигнала состоит из трех компонентов: несущей и двух боковых колебаний. Для случая настройки колебательного контура на частоту сигнала ток на его входе определяется выражением [51]:

где




Из выражения (13.7) видно, что на верхней боковой частоте ток запаздывает, а на нижней он опережает напряжение на угол В, при этом коэффициент модуляции
уменьшается в соответствии с выражением:

Попробуем воспользоваться приведенными формулами для расчета параметров выходного АМ-сигнала со следующими исходными данными (кроме показанных на рис. 13.14,

Lk=0,5 Гн, Ck=5 нФ, контур настроен на несущую частоту. В результате расчетов получаем: Q=0,5 20000/1000=10; С=2 10-3140/20000=3,14; B=arctg3,14=72,33°;

Результаты моделирования показаны на рис. 13.14, б, откуда видно, что временной интервал Т2-Т1, характеризующий фазовый сдвиг выходного сигнала, составляет около 0,4 мс, что при периоде модулирующей частоты 2 мс соответствует примерно 72°, т.е. близко к расчетному.
Контрольные вопросы и задания
1. Проведите моделирование ВУ на рис. 13.13, а при Rp=l кОм и Rn=1000 МОм и сравните полученные результаты с расчетными по формуле (13.5).
2. При расчетах зависимости резонансной частоты и коэффициента передачи ВУ по формуле (13.5) от емкости нагрузки Сп получены, в частности, следующие ре-
зультаты (цифры в скобках относятся к результатам моделирования): при Сп=1нФ К=-32,26 дБ (-31,9 дБ), F=2,87 кГц (2,87 кГц); при Сп=10 нФ К=-34,2 дБ (-31,6 дБ), F=2,66 кГц (2,66 кГц). Из приведенных данных видно, что если результаты расчета и моделирования по определению резонансной частоты совпадают, то по коэффициенту передачи они заметно отличаются. Причем, если расчетные значения К с ростом Сп уменьшаются, то при моделировании они, наоборот, увеличиваются. Чем объяснить такое явление и имеет ли оно практическое значение?
3. Используя схему на рис. 13.13, а при Rn>>Rp=l кОм, на основании выражения (13.3) рассчитайте зависимость резонансной частоты и коэффициента передачи ВУ от индуктивности рассеяния Le. Сопоставляя результаты расчета с результатами моделирования, установите правомерность включения индуктивности Le в соответствии с эквивалентной схемой на рис. 13.12.
4. Используя модель на рис. 13.14, а, исследуйте зависимость фазового угла и формы выходного сигнала от частоты модулирующего сигнала в диапазоне частот от 10 до 800 Гц.
5. Используя выражение (13.7), по аналогии с методикой получения формулы (13.3) получите выражение для коэффициента передачи ВУ для АМ-колебаний.
6. Используя методику, изложенную в разд. 13.5, определите коэффициент модуляции AM колебания на рис. 13.14, б и сравните с расчетным значением.
Связанные контуры
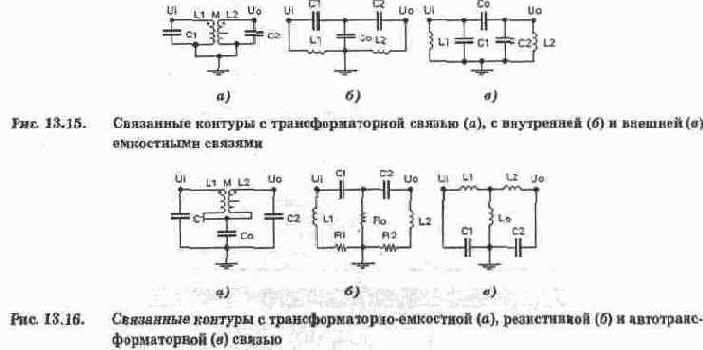
Связанные контуры используются в резонансных усилителях приемно-пере-дающих устройств. Наибольшее распространение получили двухконтурные системы, показанные на рис. 13.15 и 13.16. На них обозначено: Ui, Uo — напряжения на входе и выходе контуров; М — коэффициент взаимной индуктивности; Ro, Co, Lo — элементы связи; LI, Cl, Rl, L2, С2, R2 — элементы первого и второго контуров.
Одной из важнейших характеристик связанных контуров является коэффициент связи

Для схемы на рис. 13.15, а

Для схемы на рис. 13.15, б

Для схемы на рис. 13.15, е

Для схемы на рис. 13.16, а

Для схемы на рис. 13.16, б

Для схемы на рис. 13.16, в

В качестве объекта исследования выберем схему на рис. 13.15, в, которая с дополнительными элементами показана на рис. 13.17. Она дополнена резисторами R1 и R2, имитирующими активные сопротивления катушек индуктивности. Переключатель Z позволяет реализовать два режима: измерение АЧХ и ФЧХ (в положении переключателя, показанном на рисунке) и исследование прохождения AM сигналов через систему связанных контуров.

Параметры системы связанных контуров определятся коэффициентом связи, затуханием одиночного контура D (величина, обратная добротности) и резонансными частотами каждого контура. Поскольку для схемы на рис. 13.17 С1=С2=С, L1=L2=L, R1=R2=R, то эти параметры определяются с помощью выражений [58]:

Для связанных контуров характерным является наличие двух частот связи [58]


Для схемы на рис. 13.17 расчеты по этим формулам при K=D=0,01 (режим критической связи) дают: F1=F2=F=3,17 кГц, т.е. частоты связи практически совпадают, а АЧХ (рис. 13.18, а) представляет собой одногорбую резонансную кривую.
Увеличим коэффициент связи, выбрав Со=1 нФ. Для этого случая параметры схемы имеют следующие расчетные значения: К=0,176; F=2,9 кГц; F1=2,7 кГц;
F2=3,18 кГц. Результаты моделирования приведены на рис. 13.18, б, откуда видно, что АЧХ при коэффициенте связи выше критического имеет двугорбый характер, соответствующий двум частотам связи, и отличается более крутыми скатами АЧХ при более широкой полосе пропускания, которая обычно определяется на уровне 0,707 (-3 дБ) и равна AF=F-D (F — резонансная частота). Анализ показывает [51, 58], что полоса пропускания связанных контуров при критической связи (K=D) составляет 1.41F-D и достигает максимального значения 3.1F-D при K=2,41D. Следует отметить, что при связи контуров ниже критической (K<D) полоса пропускания двухконтурной системы может быть меньше полосы пропускания одиночного контура. Так, например, при K=0,1D полоса пропускания составляет 0,65F-D. Это свойство связанных контуров часто используется на практике, когда требуется получить полосу пропускания уже полосы пропускания одиночного контура.

В заключение рассмотрим многоконтурную систему связанных контуров, используемую в качестве фильтра сосредоточенной селекции (ФСС) в каскаде преобразователя частоты многих радиоприемников. Анализ показывает [59], что наиболее эффективной (по критерию качество-стоимость) является 4-контурная система (рис. 13.19, а), представляющая собой набор из контуров двух типов: два крайних имеют увеличенную в два раза индуктивность и уменьшенную в два раза емкость по сравнению со средними двумя контурами, т.е. все четыре контура имеет одинаковую собственную резонансную частоту. Увеличение индуктивности двух крайних контуров
позволяет увеличить характеристическое сопротивление этих контуров

Такой выбор позволяет выравнять коэффициенты передачи всех контуров при включении на входе и выходе фильтра согласующих сопротивлений Rim и Rox, шунтирующих Rx крайних контуров. Однако такое конструктивное выполнение контуров, как будет показано ниже на практическом примере, не является обязательным. Заметим, что наибольшее влияние на форму АЧХ оказывает сопротивление Rox, поэтому в схеме использован переключатель Х для возможности оперативного исследования влияния этого сопротивления. Емкость конденсаторов связи Со выбирается, в зависимости от требуемой полосы пропускания, из необходимого соотношения коэффициента связи К и затухания D. Указанное на рис. 13.19, а значение емкостей Со, обеспечивающих связь выше критической, выбрано из соображения наглядности, чтобы показать основное преимущество рассматриваемого фильтра, заключающееся в обеспечении широкой полосы пропускания при достаточно крутых скатах резонансной кривой.
АЧХ фильтра при указанных на рис. 13.19, а параметрах показана на рис. 13.19, б. Из сравнения этой АЧХ с ранее полученными для двухконтурных систем (см. рис. 13.18) видно, что 4-контурная система имеет явно выраженную плоскую часть АЧХ. Однако такая гладкая вершина АЧХ достигается только при соответствующем выборе сопротивления согласующего резистора.
Следует отметить, что расчет многозвенных фильтров является достаточно сложной задачей. В работе [59] приводятся следующие соотношения для расчета параметров рассматриваемого фильтра:


индуктивность — в мкГ; частота — в кГц; сопротивление — в кОм.
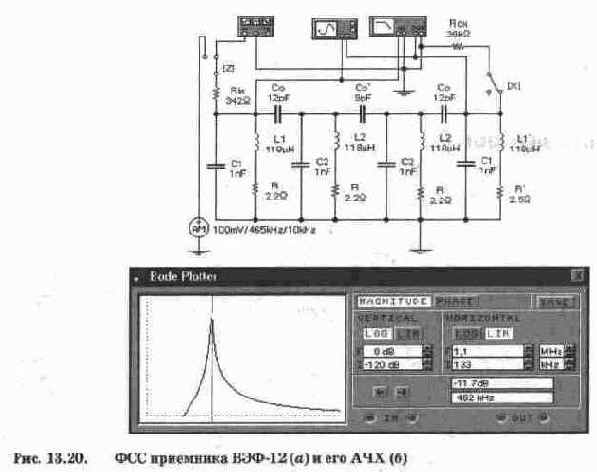
К сожалению, результаты расчета по приведенным формулам существенно отличаются от результатов моделирования. Поэтому нам пришлось обратиться к практическому примеру использования рассматриваемого фильтра в популярном в 70-е годы переносном приемнике ВЭФ-12, схема которого показана на рис. 13.20, а [60]. Фильтр составлен из 4 совершенно одинаковых контуров, причем емкость связи Со' правой и левой пар контуров выбрана несколько меньше емкости связи Со в каждой из них.
Указанные на рис. 13.20, а номинальные значения конденсаторов и индуктив-
ностей позволяют рассчитать следующие параметры:


[. Приведенные в
[60] значения добротности 155 для первых трех контуров и 135 для третьего позволили рассчитать сопротивления потерь R=R,/Q=342/155=2,2 Ом; R'=342/135=2,5 Ом. Согласование выхода фильтра с последующим транзисторным каскадом с ОЭ осуществляется с помощью обмотки связи, имеющей 4 витка и размещаемой на одном каркасе с катушкой L1' с числом витков 75, т.е. коэффициент трансформации составляет около 19. Если принять, что входное сопротивление транзисторного каскада равно 100 Ом, это сопротивление приводится к первичной обмотке как Ro,=100•(19)2=36 кОм, что и отражено на рис. 13.20, а.
Из АЧХ фильтра (рис. 13.20, б) видно, что расчетное значение частоты фильтра совпадает с полученным при моделировании. Таким образом, проведенные исследования позволяют сделать вывод, что для ориентировочных расчетов рассматриваемого ФСС можно пользоваться расчетными соотношениями для двухконтурных связанных систем.
Контрольные вопросы и задания
1. Для каких целей используется система связанных контуров?
2. Какие типы связанных контуров Вам известны и чем они отличаются?
3. Проведите расчеты для схемы на рис. 13.17 при емкости конденсатора связи Со=500 пФ и сравните результаты расчета с результатами моделирования.
4. Для схемы на рис. 13.17 при K=2,41D рассчитайте емкость конденсатора связи и частоты связи. Результаты расчета и полосу пропускания (K=3,1D) проверьте моделированием.
5. Используя схему на рис. 13.17, исследуйте процесс прохождения АМ-сигналов через систему связанных контуров при различных значениях модулирующей и несущей частот.
6. Подготовьте схему для моделирования связанных контуров с внутренней емкостной связью (рис. 13.15, б), проведите расчеты частот связи при К=0,01 (критический режим) и K=2,41D. Результаты расчета сравните с результатами моделирования. Отметим в качестве подсказки, что значение емкости конденсатора связи Со=0,5 мкФ соответствует режиму критической связи. Кроме того, предварительный анализ показывает, что при одинаковых параметрах обоих контуров расчет частоты F ведется при эквивалентной емкости контура Сk=С-Со/(С+Со).
7. Какие цели преследуются при использовании многоконтурных фильтров?
8. Используя схему на рис. 13.19, а и аналитические соотношения для системы связанных контуров, определите значение емкости Со конденсаторов связи, соответствующее режиму критической связи.
9. Исследуйте зависимость формы АЧХ от сопротивления резистора Rox в 4-кон-турной системе на рис. 13.19, а.
10. Исследуйте зависимость формы выходного сигнала схемы на рис. 13.19, а в режиме передачи АМ-сигналов от соотношения частоты несущей и резонансной частоты 4-звенного фильтра при частоте модулирующего сигнала 100 Гц и 1 кГц.
11. В режиме передачи АМ-сигналов в схеме на рис. 13.20, а исследуйте форму огибающей при частоте модулирующего сигнала 1, 10, 15 и 20 кГц.
Преобразователи частоты
Преобразователи частоты (ПЧ) используются в радиоприемных устройствах для преобразования поступающего из антенны радиочастотного сигнала в сигнал промежуточной частоты. Принцип преобразования частоты сигналов заключается в
перемножении двух гармонических колебаний

Результирующее колебание описывается выражением:



Это колебание представляет собой сумму двух колебаний с частотами


Выделяя с помощью фильтра ту или иную составляющую выражения (13.8), получим колебание с другой, более низкой или более высокой частотой. Схема ПЧ, реализующей такой алгоритм, показана на рис. 13.21, а. Она содержит два источника гармонических колебаний X(t) и Y(t), перемножитель М с коэффициентом передачи 1, переключатель Z для переключения режимов моделирования, контрольно-измерительные приборы и фильтр с резонансной частотой около 3,18 кГц на рассмотренной в разд. 13.3 двухконтурной системе с внешней емкостной связью.
В положении ключа Z, показанном на рис. 13.21, а, производится моделирование ПЧ. Согласно данным, приведенным на рис. 13.21, а для источников входных сигналов, сигнал на выходе перемножителя имеет комбинационные составляющие с частотами 16,82 и 3,18 кГц. Поскольку фильтр настроен на 3,18 кГц, будет выделена комбинационная составляющая с разностной частотой, в чем можно убедиться из рис. 13.21,6.
Из рис. 13.21,6 видно, что период сигнала на выходе ПЧ составляет Т2-Т1=0,325 мс, что соответствует частоте 3,18 кГц. Амплитуда сигнала на выходе фильтра составляет около 31 В. Поскольку коэффициент передачи перемножителя выбран равным 1, амплитуда сигнала на входе фильтра равна 1В и, следовательно, коэффициент передачи фильтра должен быть равен 31 на частоте 3,18 кГц. Проверим этот вывод на модели. Для этого переключатель Z переведем в нижнее положение и снимем АЧХ фильтра. Результат моделирования показан на рис. 13.22, из которого видно, что коэффициент передачи фильтра на частоте 3,16 кГц составляет 30 дБ, что в относительных единицах составляет 31,6, т.е. практически равно расчетному.

Контрольные вопросы и задания
1. Для каких целей используется преобразование частоты в радиоприемных устройствах?
2. Из каких соображений выбирается частота гетеродина ПЧ?
3. Можно ли использовать ПЧ для детектирования AM- колебаний?
4. Проведите моделирование ПЧ при выделении верхней комбинационной составляющей, выбрав соответствующим образом параметры фильтра.
Модуляторы
Одним из основных элементов радиопередающего устройства является модулятор. Начнем с наиболее простой модуляции — амплитудной. Как и в случае преобразователя частоты, модуляция по амплитуде сводится к перемножению модулирующего сигнала

и несущего

После перемножения и тригонометрических преобразований получим результирующее колебание в следующем виде:

где M=Ym/Em — коэффициент модуляции; Em=Eo-Xm.
Схема амплитудного модулятора показана на рис. 13.23. Она содержит двухвхо-довой суммирующий усилитель на ОУ к одному входу которого подключен источник постоянного напряжения Ео, к другому — источник модулирующего напряжения
Y'(t) (амплитудой Ym=l,42 В). Поскольку коэффициент усиления по каждому входу
R3/R1=1, на выходе усилителя формируется сигнал

, который поступает на Y-вход перемножителя М с коэффициентом передачи 1. На Х-вход перемножителя подается сигнал несущей X(t) с амплитудой Хт=5,66 В.

При указанных на рис. 13.23 значениях параметров расчетные значения М=1,42/4=0,35; Еm=4-5,66=22,64. Проверим полученные результаты моделированием, результаты которого показаны на рис. 13.24, а. Для определения коэффициента модуляции по осциллограмме AM сигналов используем методику из [51], согласно которой М=Ам/Ас, где (см. рис. 13.24, a) AM=¦VB2-VB1¦/2=15,76/2=7,88 В; Ac=AM+¦VB2¦=7,88+14,7=22,58 В и, следовательно, М=0,349, т.е. практически равно расчетному. Для проверки второго расчетного параметра (Еm) необходимо исключить воздействие модулирующего сигнала. Для этого достаточно сделать его пренебрежимо малым — в нашем случае вместо 1 В установим 1 мкВ. Результаты моделирования показаны на рис. 13.24, б, откуда видно, что амплитуда несущей Em=VBl=VB2=22,58 В, что практически совпадает с расчетным значением. Отметим, что оно равно среднему значению Ас амплитудно-модулированного колебания.
Другим распространенным типом модуляции является угловая. Такое название является общим для частотной и фазовой модуляции. Связь между ними формулируется следующим образом [51]: изменение частоты во времени по закону эквивалентно изменению полной фазы по закону интеграла , а изменение полной фазы по закону эквивалентно изменению частоты по закону производной Это положение, являющееся основным в теории угловой модуляции, определяет связь между изменениями частоты и фазы и указывает на общность, существующую между двумя разновидностями угловой модуляции — модуляцией частоты (ЧМ) и модуляцией фазы (ФМ).
Сигнал с частотной модуляции в простейшем случае описывается выражением:

где АО — амплитуда несущей; До) —диапазон частотного отклонения (девиации) несущей под действием модулирующего (в данном случае — синусоидального) сигнала.
Из выражения (13.9) видно, что периодическая модуляция частоты эквивалентна гармонической вариации фазы с той же частотой, при этом амплитуда получаемой вариации фазы равна

Это отношение численно равно индексу
модуляции М, являющемуся основным параметром угловой модуляции. Существенно, что индекс модуляции не зависит от средней (немодулированной) частоты w, a определяется исключительно величиной девиации и модулирующей частотой.
Сигнал с фазовой модуляции описывается выражением:


Поскольку выражения (13.9) и (13.10) получены для гармонического модулирующего сигнала, то из сравнения этих выражений с учетом обозначения

Перейдем к рассмотрению схемы фазового модулятора, показанной на рис. 13.25, а. Она содержит функциональный генератор в качестве источника модулирующего сигнала (рис. 13.25, б), источник напряжения Ui несущей и фазовраща-тель на OU1 с полевым транзистором VT в режиме управляемого сопротивления. Канал В осциллографа подключен к выходу OU1, а канал А — к источнику несущей для возможности наблюдения эффекта модуляции.

Анализ фазового модулятора, представляющего собой систему с переменными параметрами, является достаточно сложной математической задачей. Поэтому ограничимся рассмотрением статического режима, заменив сопротивление полевого транзистора сопротивлением R. В таком случае напряжение на не инвертирующем входе OU1 в операторной форме будет иметь вид:

Это напряжение
передается на выход OU1 с коэффициентом передачи 1+R2/R1=2 (см. гл. 10). Напряжение Ui(p) передается на выход того же усилителя с коэффициентом передачи R2/R1=1, причем с инвертированием сигнала. Следовательно, выходное напряжение OU1 Uof(p)=2Ui'(p)-Ui(p)=Ui(p)(pRC-l)/(pRC+l) и коэффициент передачи равен

Вводя замену переменных


где

Из (13.12) нетрудно определить, что модуль коэффициента передачи равен 1, а его аргумент с учетом известного из тригонометрии соотношения

будет определяться выражением

Из (13.13) видно, что по сравнению с обычной RC-цепью рассматриваемый фа-зовращатель обеспечивает возможность получения фазового сдвига в диапазоне от О до 180°. Поскольку в выражении (13.13) сопротивление R (сопротивление полевого транзистора) изменяется под действием модулирующего сигнала, выражение (13.13) отражает факт фазовой модуляции, что и подтверждается осциллографическими измерениями на рис. 13.26, откуда видно, что максимальный временной сдвиг колебаний на входе и выходе модулятора равен Т2-Т1=0,038 мс. Поскольку период несущей составляет 0,1 мс, этот временной сдвиг эквивалентен фазовому сдвигу 136,8°.

Контрольные вопросы и задания
1. Чем отличается процесс формирования АМ-сигнала от преобразования частоты?
2. Используя схему на рис. 13.21, проведите расчеты и моделирование для Ео=3 В.
3. В чем заключается различие между фазовой и частотной модуляцией?
4. Используя схему на рис. 13.25, а, исследуйте зависимость фазового сдвига (индекса модуляции) от амплитуды модулирующего напряжения.
5. Используя схему на рис. 13.27, исследуйте зависимость сопротивления полевого транзистора типа IDEAL от входного напряжения в диапазоне О...4 В. Напряжение отсечки транзистора выберите равным -4 В. На основании полученных данных по формуле (13.13) рассчитайте фазовый угол для двух-трех значений сопротивления R и сравните полученные результаты с результатами моделирования, для чего необходимо в схеме на рис. 13.25, а функциональный генератор заменить на источник постоянного напряжения U, используемый в схеме на рис. 13.27.

Детектор частотно-модулированных сигналов
Частотный детектор (ЧД) — это устройство, выходное напряжение которого является функцией частоты входного сигнала. Частотные детекторы используются при радиоприеме ЧМ-сигналов и в устройствах автоматической подстройки частоты в разнообразных радиоэлектронных устройствах.
Основной характеристикой ЧД является его передаточная характеристика, которая показывает зависимость постоянного выходного напряжения Uo от частоты входного сигнала FL Чувствительность частотного детектора определяется крутизной его характеристики

Принцип работы большинства ЧД основан на преобразовании частотно-модулированного напряжения в амплитудно-частотно-модулированное с последующим амплитудным детектированием. В качестве преобразователя частотно-модулированного напряжения в амплитудно-частотно-модулированное используется любая линейная система, коэффициент передачи которой зависит от частоты. Поскольку выходное напряжение таких детекторов зависит не только от частоты, но и от амплитуды входного напряжения, их иногда называют также частотно-амплитудными детекторами. Если требуется устранить влияние амплитуды входного напряжения, перед такими детекторами включается амплитудный ограничитель (см. гл. 8).
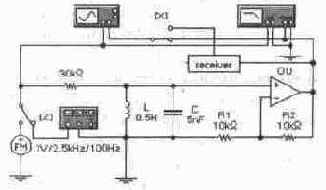
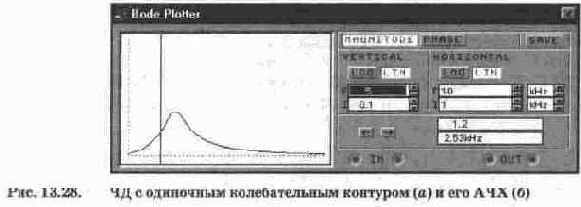
Наиболее простой схемой ЧД является схема с одиночным контуром на рис. 13.28, а. Она содержит параллельный колебательный контур на элементах L, С, на вход которого через резистор 30 кОм и переключатель Z входной сигнал может подаваться или от функционального генератора (режим измерения АЧХ и ФЧХ) или от источника фазо-модулированных колебаний FM (режим детектирования). Сигнал с выхода колебательного контура через усилитель на OU с коэффициентом усиления 1+R2/R1=2 подается на входы осциллографа и измерителя АЧХ-ФЧХ, а также на вход субблока receiver, на выходе которого формируется модулирующее (низкочастотное) колебание (в данном случае частотой 100 Гц), его можно наблюдать на экране осциллографа после подключения канала В к выходу субблока с помощью переключателя X.
Основная идея схемы преобразовательной части детектора может быть пояснена с помощью АЧХ колебательного контура (рис. 13.28, б). Рабочая точка ЧД может быть выбрана как на правом, так и на левом скате АЧХ контура. Как видно из рис. 13.28, б, левый скат более крутой, поэтому рабочая точка (2,53 кГц), отмеченная визирной линией, выбрана на нем.

Как указывалось в разд. 13.5, модуляция фазы с индексом модуляции Ф=5
вызывает девиацию частоты

Для проверки этих данных обратимся к результатам осциллографических измерений, представленных на рис. 13.29, откуда видно, что максимальное значение частоты составляет 1/[(Т2-Т1)/2]=2/6,73-10-4=2985 Гц, т.е. отклонение от средней частоты составляет 485 Гц, что приблизительно равно расчетному значению DF. Переставив визирные линии на осциллограмме в область минимальной частоты, можно убедиться, что она равна около 2000 Гц, т.е. и в этом случае отклонение близко к расчетному значению DF.
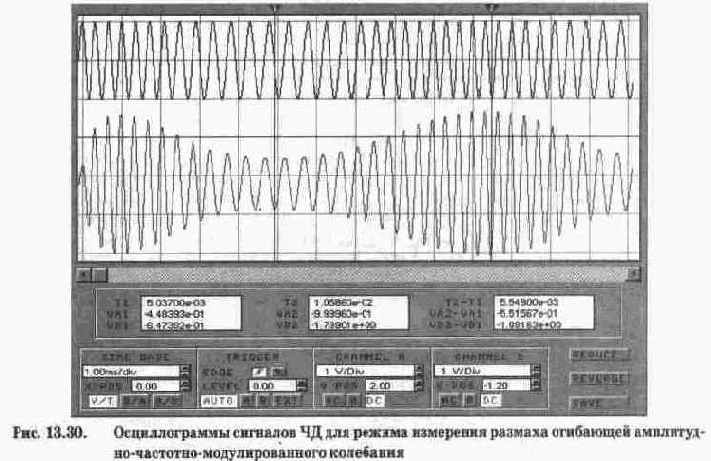
Перейдем к анализу коэффициента передачи детектора. Для этого найдем крутизну левого ската резонансной кривой на рис. 13.28, б в диапазоне частот 2000...2985 Гц. Пользуясь визирной линейкой, находим, что коэффициент передачи на частоте 2000 Гц составляет 0,65, а на частоте 2985 Гц — 1,7, т.е. средняя крутизна резонансной кривой в указанном диапазоне частот составляет 1,05-103-1/Гц. Учитывая, что амплитуда ФМ-сигнала составляет 1 В, эта крутизна в единицах напряжения составит S=1,05-103 В/Гц, т.е. размах (двойная амплитуда) огибающей амплитудно-частотно-модулированного сигнала составит S-2AF=1,05 10-3 985=1,034 В. Рассмотрим результаты моделирования, представленные на рис. 13.30, откуда видно, что удвоенная амплитуда огибающей амплитудно-частотно-модулированного сигнала равна VB2-VB1=1,09163 В, что достаточно близко к расчетному значению.
Недостатком рассмотренного детектора является сравнительно большие нелинейные искажения. Расчеты показывают [56], что коэффициент второй гармоники для этого детектора равен около 19%, а третьей — 3,6%. Для уменьшения нелинейных искажений можно увеличивать затухание контура, однако это приводит к существенному уменьшению крутизны характеристики детектора, т.е. к уменьшению напряжения на его выходе.
Более высокими показателями по нелинейным искажениям обладают балансный детектор с двумя взаимно расстроенными контурами и детектор со связанными контурами, а также так называемый дробный детектор, который отличается от первых двух схемой построения выпрямительной части, обеспечивающей минимальную зависимость выходного сигнала от изменений амплитуды входного [56].
Контрольные вопросы и задания
1. В каких устройствах используются частотные детекторы?
2. Какой основной алгоритм преобразования сигналов используется при построении частотных детекторов?
3. Используя схему ЧД на рис. 13.28, а, выберите его рабочую точку на правом склоне резонансной кривой на рис. 13.28, б. В соответствии с произведенным выбором установите частоту несущей источника ФМ и при индексе модуляции Ф=5 проведите измерения коэффициента передачи.
4. Исследуйте зависимость формы продетектированного сигнала на выходе субблока receiver от индекса модуляции ФМ-колебания в диапазоне Ф=2...7.
Элементы приемо-передающих устройств
Приемо-передающие устройства на промежутке достаточно длительного времени являлись основным двигателем прогресса в области радиоэлектроники и ее элементной базы (см. Приложения 3). Значимость этих устройств для общества не преуменьшилась и после того, как в 70-х годах с появлением микропроцессоров начали бурно развиваться средства вычислительной техники.
13.1. Принципы построения приемо-передающих устройств
13.2. Входные устройства, радиоприемных устройств
13.3. Связанные контуры
13.4. Преобразователи частоты
13.5. Модуляторы
13.6. Детектор частотно-модулированных сигналов
13.7. Линии связи
Модели для решения дифференциальных уравнений
Поскольку моделирование автоматических систем управления чаще всего сводится к решению дифференциальных уравнений, то в первую очередь рассмотрим устройства для их решения, которые в аналоговой вычислительной технике часто называют дифференциальными анализаторами.
В дифференциальных анализаторах реализуются два метода интегрирования дифференциальных уравнений. Один из них основан на повышении порядка производных искомой функции, а другой — на его понижении [29, 61]. Рассмотрим их на примере линейного дифференциального уравнения с постоянными коэффициентами третьего порядка

Для интегрирования дифференциального уравнения методом повышения порядка производных его необходимо решить относительно производной неизвестной функции Z низшего порядка. Приняв Z за производную нулевого порядка, из (14.1) получим

Структурная схема модели для решения уравнения (14.2) показана на рис. 14.1. Из формулы (14.2) следует, что для получения переменной Z необходимы следующие вычислительные блоки: 4-входовой сумматор (блок S на рис. 14.1), три дифференциатора (блоки D) и три умножителя (блоки X) для умножения на коэффициенты AL Выходной сигнал сумматора, обозначенный на схеме рис. 14.1 буквой Z, будет искомым решением уравнения (14.1).
Отметим, что метод повышения порядка производных почти не применяется на практике, так как дифференцирующие блоки весьма чувствительны к помехам (см. гл. 10), которые могут стать источником ошибок. Например, если в электронной вычислительной машине возмущение f(t) подается на суммирующий блок от функционального потенциометра, то фактически оно будет изменяться не плавно, а сту-пенчато при переходе подвижного контакта от одного витка потенциометра к другому, что будет регистрироваться дифференцирующими блоками в виде значительных всплесков напряжения. Значительные ошибки в определении мгновенного значения производной имеют место и в точках перехода от одной аппроксимирующей прямой к другой, при вводе возмущения от диодного функционального аппроксиматора и т.п. Метод повышения порядка производных используется только в тех случаях, когда без него нельзя обойтись, например, в специализированных вычислительных машинах. Однако в этом случае используются специальные дифференцирующие устройства, вырабатывающие не мгновенные, а усредненные (сглаженные) значения производных.

Для интегрирования уравнения (14.1) методом понижения порядка производных его нужно решить относительно производной функции Z(t) высшего порядка, т.е.

Структурная схема модели для этого случая показана на рис. 14.2. Из формулы (14.3) видно, что для получения переменной Z необходимы следующие вычислительные блоки: 4-входовой сумматор (блок S на рис. 14.2), три интегратора (блоки I) и три умножителя (блоки X) для введения коэффициентов Bi. Выходной сигнал третьего интегратора, обозначенный на схеме рис. 14.2 буквой Z, будет искомым решением уравнения (14.3).
Достоинством метода понижения порядка, нашедшего наибольшее распространение на практике, является высокая точность, обусловленная применением интеграторов, что устраняет в определенной мере влияние различных флуктуаций, возникающих в схеме.
По конструктивному выполнению моделирующие устройства делятся на матричные и структурные. Устройства матричного типа представляют собой конструктивно законченные наборы из разных вычислительных блоков, каждый из которых позволяет моделировать одно из уравнений системы дифференциальных уравнений.
Такие устройства являются достаточно специализированными и в нашем случае не представляют интереса. Устройства структурного типа реализуют решение дифференциальных уравнений и их систем в том виде, в каком они заданы. Они представляют собой наборы простейших вычислительных блоков, соединяемых между собой определенным образом в зависимости от вида дифференциального уравнения высокого порядка или системы дифференциальных уравнений первого порядка, и уступают матричным только по оперативности набора подготовленных к решению задач.
В общем случае процесс решения дифференциального уравнения путем моделирования состоит из следующих этапов:
1) приведение дифференциального уравнения к виду, удобному для моделирования;
при этом исходное уравнение, подлежащее воспроизведению, называют моделируемым, а уравнение, описывающее связь между входными и выходными величинами моделирующего устройства — моделирующим или машинным уравнением;
2) выбор масштабов машинного уравнения; под масштабами понимаются отношения математических величин к воспроизводящим их физическим величинам;
если некоторая математическая переменная величина Х изображается физической величиной, например, напряжением U, то масштаб К, величины Х (или масштаб Кц величины U) определяется выражением Kх,=Ku=X/U, т.е. масштаб представляет собой число единиц математической величины, соответствующее одной единице физической величины, моделирующей первую;
3) соединение вычислительных блоков для воспроизведения машинного уравнения (в EWB — подготовка схемы модели);
4) проведение моделирования с регистрацией результатов с последующим переходом при помощи ранее выбранных масштабов от переменных величин модели к переменным величинам моделируемой системы-оригинала.
Перечисленные этапы часто относят к так называемому методу моделирования по уравнению. Он позволяет не только решать различные уравнения, но и исследовать системы автоматического управления, для которых уже заранее выбраны все параметры звеньев. Дальнейшим развитием этого метода является метод структурного моделирования, который позволяет решать более сложные задачи выбора параметров структурных звеньев системы-оригинала (см. разд. 14.5).
В качестве примера рассмотрим моделирование последовательного колебательного контура, показанного в верхней части рис. 14.3 и состоящего из катушки индуктивности L с активным сопротивлением R и конденсатора Ck. В нижней части рис. 14.3 изображена электронная модель этого же контура на решающих элементах: сумматоре на ОУ 1, двух интеграторах на ОУ 2 и 3 и инвертирующем усилителе на ОУ 4. Позиционное обозначение резисторов принято в соответствии с рекомендациями [29]: порядковый номер резистора в цепи обратной связи совпадает с номером ОУ, токозадающие резисторы имеют двухзначный номер, первым идет номер соответствующего ОУ, вторым — порядковый номер резистора данной группы. Для конденсаторов интеграторов можно использовать такой же принцип формирования позиционных обозначений, однако в связи с тем, что, как правило, в интеграторах моделирующих установок они имеют одинаковое номинальное значение (в данном случае 1мкФ), то они имеют и одинаковое позиционное обозначение. При обозначении выходных напряжений решающих элементов используется тот же принцип, для наглядности в скобках указывается также и номер соответствующей производной. Для регистрации результатов моделирования в схеме на рис. 14.3 используется осциллограф: канал А — для регистрации напряжения на конденсаторе Ck, канал В — для регистрации напряжения на выходе модели. В качестве источника возмущающего сигнала в рассматриваемом случае используется источник постоянного напряжения U, однако в общем случае это может быть любая функция времени.

Запишем дифференциальное уравнение колебательного контура в следующем виде:


Приведем уравнение (14.4) к виду (14.3)


Как следует из (14.5),.модель колебательного контура должна содержать сумматор (в схеме на рис. 14.3 он выполнен на ОУ 1) и два интегратора (ОУ 2,3). Поскольку сигнал на выходе ОУ 2 имеет полярность, совпадающую с полярностью сигнала на входе сумматора на ОУ 1, то для обеспечения устойчивости модели выход интегратора на ОУ 2 соединен со входом сумматора через инвертирующий усилитель на ОУ 4.
Составим уравнения для каждого решающего блока:
для сумматора

для первого интегратора


для второго интегратора


для инвертирующего усилителя


Разрешая систему уравнений (14.6) — (14.9) относительно величины U3, являющейся в данном случае искомой, получим:

В общем случае величина U3 может представлять исходную переменную (в данном случае — напряжение на конденсаторе Ck) в некотором масштабе, то же самое относится и к независимой переменной (времени) и возмущающему воздействию Uo. Поэтому в уравнение (14.10) необходимо ввести масштабные коэффициенты, которые определяются очевидными уравнениями преобразования:

где М„ — масштаб представления искомой величины Х в виде напряжения; My — масштаб представления возмущающего воздействия Uo; М, — масштаб времени.
С учетом соотношений (14.11) уравнение (14.10) запишется в виде:

В таком же виде запишем исходное уравнение (14.4):

Очевидно, что из условия идентичности оригинала и его модели коэффициенты при соответствующих переменных в уравнениях (14.12) и (14.13) должны быть одинаковыми, т.е.

(14.14)
Из сравнения коэффициентов в правой части каждого уравнения следует требование Мх=Му. Кроме того, из схемы на рис. 14.3 видно, что K11=K12=K13=K41=1. Примем для упрощения последующих расчетов Mt=l. В таком случае условия (14.14) запишем в следующем виде: K21=R/L; K21-K31=l/(LCk) или с учетом обозначений для К21 и К31
R21=L/RC; R31=RCk/C. (14.15)
Выражения (14.15) позволяют выбрать параметры интеграторов модели с использованием параметров оригинала. При указанных на схеме номинальных значениях этих параметров получаем R21=10 кОм и R31=100 Ом.
Перед проведением моделирования необходимо включить режим анализа переходных процессов и установить опцию для паузы после заполнения экрана осциллографа (меню Circuit/Analysis Options). Результаты моделирования показаны на рис. 14.4, откуда видно, что форма и амплитуда сигналов на емкости конденсатора Ск колебательного контура и на выходе его модели совпадают. Из рис. 14.4 видно также, что период затухающих колебаний колебательного переходного процесса равен Т=Т2-Т1=6,48 мс близок к расчетному с использованием формулы
Контрольные вопросы я задания
1. В чем заключается различие между физическим и математическим моделированием?
2. Какие средства вычислительной техники могут быть использованы при математическом моделировании?
3. Какие методы решения дифференциальных уравнений используются при их моделировании с помощью EWB?

4. Что такое "структурное моделирование" и моделирование "по уравнению"? Какой метод использован при подготовке модели на рис. 14.1.
5. Из сравнения рис. 14.2 и 14.3 установите, каким образом в моделях вводятся коэффициенты дифференциального уравнения (в частности, коэффициенты В1 и ВО)? Обязательно ли при этом использование перемножающих устройств?
6. Из осциллограмм на рис. 14.4 видно, что переходной процесс в резонансном контуре имеет колебательный характер. Известно (это следует из решения уравнения (14.13)), что вид переходного процесса в колебательном контуре определяется соотношениями

7. В модели на рис. 14.3 источник постоянного напряжения U замените на источник переменного напряжения с амплитудой 1 В и частотой, равной резонансной частоте контура, и проведите моделирование.
Специализированные функциональные преобразователи
Специализированные преобразователи используются для моделирования нелинейных элементов (или просто нелинейностей) систем управления, связанных со скачкообразными изменениями коэффициентов передачи отдельных звеньев (их часто называют типичными нелйнейностями). К таким нелинейностям приводит наличие ограничения координат по модулю, наличие зоны нечувствительности, наличие люфта (зазора) в кинематических парах и др. Кроме того, они используются также для улучшения динамических характеристик систем управления [29, 65]. Рассмотрим модели таких нелинейностей.
Моделирование ограничения по модулю. Ограничение по модулю имеет место при ограниченной мощности звена или задается из конструктивных соображений (например, для получения заданного закона регулирования). В качестве практического примера можно привести устройство для самолета с ограничением отклонения рулей при помощи упоров.
Схема для воспроизведения рассматриваемой нелинейности показана на рис. 14.17, а, на котором показана также лицевая панель функционального генератора с режимами его работы. Схема преобразователя представляет собой масштабирующее звено на операционном усилителе с коэффициентом передачи K=R2/R1. Кроме резистора R2, в цепь обратной связи ОУ введена цепочка из встречновключен-ных стабилитронов VD1 и VD2, с помощью которых ограничивается величина выходного напряжения и тем самым формируется требуемая характеристика. Напряжение стабилизации обоих стабилитронов в данном случае установлено (с помощью диалогового окна) равным 1В. Напряжение ограничения определяется напряжением U., равным сумме напряжения стабилизации и падения напряжения на открытом стабилитроне (около 0,6 В). Таким образом, в данном случае U,=1,6 В.
Передаточная характеристика рассматриваемой схемы показана на рис. 14.17, б, откуда видно, что при входном напряжении ¦Ui¦<U. оно передается на выход с коэффициентом передачи К=1. При ¦Ui¦>U. один из стабилитронов открывается, а второй пробивается (для положительной полуволны входного напряжения это будут соответственно стабилитроны VD2 и VD1) и коэффициент передачи становится равным K=(R2¦¦R.)/R1, где R, — суммарное сопротивление открытых стабилитронов. Поскольку обычно выбирается Rз<<R2, то коэффициент передачи K=R,/R2 существенно уменьшается, что и приводит к ограничению выходного сигнала примерно на уровне U..
При размыкании ключа Z (нажатием клавиши Z) передаточная характеристика звена приобретает релейный характер (рис. 14.17, в), поскольку при ¦Ui¦<U. цепь обратной связи ОУ разомкнута и коэффициент передачи практически равен коэффициенту усиления ОУ, установленному в данном случае равным 106.

Следует отметить, что наличие рассмотренного звена в одноконтурной системе регулирования при больших возмущениях приводит к изменению формы кривой процесса регулирования, однако это обычно не влияет на устойчивость системы. Наоборот, наличие такой нелинейности приводит в большинстве случаев к повышению устойчивости. Если в линейной неустойчивой системе возникающие в ней колебания имели бы расходящийся характер, то при наличии звена с характеристикой на рис. 14.17, б они будут увеличиваться по линейному закону только до значения U,. Далее выходная величина будет ограничена постоянным значением, что равносильно снижению общего коэффициента усиления регулятора, вследствие чего раскачивание колебаний системы прекратится. В этом смысле переход за границу устойчивости в одноконтурной системе регулирования, включающей в себя звено с нелинейной характеристикой типа рис. 14.17, б, является "безопасным" (по сравнению с чисто линейной системой).
Моделирование зоны нечувствительности. Такой вид нелинейности имеет место во многих чувствительных элементах регуляторов и в устройствах привода. В любой одноконтурной системе регулирования наличие зоны нечувствительности в каком-либо звене приводит к появлению дополнительной статической ошибки. В многоконтурных системах наличие зоны нечувствительности может привести к возникновению автоколебаний. Все это требует специального исследования в каждой конкретной системе.
Схема для воспроизведения звена с зоной нечувствительности показана на рис. 14.18, а. Эта схема отличается от показанной на рис. 4.17, а тем, что ограничивающая цепь из стабилитронов перенесена из цепи обратной связи ОУ в его входную цепь. При ¦Ui¦<U. стабилитроны VD1 и VD2 закрыты и входной сигнал на выход усилителя практически не передается, поскольку R2<<Rs', где Rs' — сопротивление утечки закрытых стабилитронов. При ¦Ui¦>U. стабилитроны открываются и коэффициент передачи усилителя становится равным K=R2/(R1+Rs)=1.
Из передаточной характеристики рассматриваемой схемы (рис. 14.18, б) видно, что зона нечувствительности воспроизводимого звена действительно близка к значению напряжения ограничения U,.

Если переключатель Z перевести в другое положение, то коэффициент усиления возрастет примерно в 50 раз. При этом на передаточной характеристике звена (рис. 14.18, в) появляется ограничивающая ветвь, вызванная ограничивающими свойствами уже самого ОУ. Из рис. 14.18, в видно, что ограничение наступает при выходном напряжении 20 В, что соответствует максимальному выходному напряжению ОУ.
Заметим, что наличие ограничивающих ветвей в передаточной характеристике на рис. 14.18, в придает ей положительная качества, о которых говорилось выше применительно к характеристике на рис. 14.17,6.
Моделирования зазора (люфта) в механической передаче. Такой тип нелинейности характерен для кинематических пар, передающих вращательное или поступательное движение. При этом различают ведущее и ведомое звено, например, ведущую и ведомую шестерню при передаче вращательного момента, причем принимают, что ведомое звено не обладает моментом инерции. В модели такой нелинейности должны быть предусмотрены элементы, воспроизводящие зону нечувствительности, а также элементы, воспроизводящие неизменность выходной координаты при изменении направления движения на время, пока весь зазор (люфт) в узле сопряжения кинематической пары не будет полностью выбран (пройден). В известных электронных моделях люфта для этой цели используются диодные дискриминирующие элементы и запоминающий конденсатор [29]. При этом модель выполняется по разомкнутой или замкнутой (следящей) схеме.

Схема модели люфта разомкнутого типа показана на рис. 14.19, б. Она содержит цепочку из встречновключенных стабилитронов и элемент памяти в виде операционного усилителя с конденсатором С2 в цепи обратной связи и конденсатором С1 на входе. В качестве источника испытательного сигнала используется рассмотренный в предыдущем разделе генератор, отличающийся тем, что в нем формируется дополнительно еще одна четверть второго периода (за счет увеличения Toff переключателя 3 на 2 с).
Передаточная характеристика схемы Uo=f(Ui) показана на рис. 14.19, б, откуда видно, что она имеет гистерезисный характер. Наклон гистерезисной кривой определяется коэффициентом передачи К=-С1/С2, а ее ширина — удвоенным напряжением срабатывания диодной цепочки, которое заметно меньше ожидаемого (около 3 В) и составляет, как показали измерения в режиме ZOOM, 2,46 В. Объясняется это тем, на наш взгляд (в работе [29] отсутствует анализ этого обстоятельства), что работа диодной цепочки в схеме модели все время происходит на пологом участке ее ВАХ, т.е. диодная цепочка выполняет роль нелинейного сопротивления. Диодная цепочка выполняет роль переключающего элемента только в течение короткого времени после пуска (передаточная характеристика, как видно из рис. 14.19, б, начинается с начала координат), когда начинается интенсивный заряд конденсаторов С1 и С2 (см. осциллограмму на рис. 14.19, в). Это приводит к фазовому сдвигу выходного сигнала (трапецеидальной формы), что явилось причиной того, что передаточная характеристика модели программой не "дорисовывалась" в течение одного периода сигнала genl. Поэтому пришлось увеличить длительность входного сигнала еще на четверть периода.
Схема модели люфта следящего (замкнутого) типа показана на рис. 14.20. Она состоит из сумматора на ОУ 1, инвертора на ОУ 2, интегратора на ОУ 3 и диодной цепочки. Передаточная характеристика схемы идентична показанной на рис. 14.19, б, ширина петли гистерезиса также равна 2,46 В, угол наклона гистерезисной кривой определяется отношением R12/R11. Напряжение входного сигнала Ui в этой схеме непрерывно сравнивается с выходным напряжением Uo (с помощью ОУ 1). Если ¦Uo-Ui¦ превышает напряжение полуширины гистерезиса (1,23 В в данном случае), то происходит срабатывание диодной цепочки и выходное напряжение начинает ограничиваться, в результате чего ширина гистерезиса поддерживается постоянной.

Следует заметить, что наличие звена с люфтом (зазором) в одноконтурной системе регулирования может приводить к возникновению колебаний в процессе регулирования с тем большей амплитудой, чем больше ширина петли, т.е. размер зазора. При этом влияние зазора на процесс регулирования будет более заметным при малых значениях входной величины и становится несущественным при достаточно больших значениях (так же как и влияние зоны нечувствительности). Наличие звена с люфтом в многоконтурной системе регулирования может во многих случаях оказаться полезным, поскольку вводимое им в обратную связь запаздывание может благоприятно влиять на качество процесса регулирования.
Моделирование статических релейных характеристик. С простейшей релейной характеристикой мы уже встречались (см. рис. 14.17, б) при рассмотрении модели ограничителя на рис. 14.17, а (при разомкнутом ключе Z). Более универсальная схема для воспроизведения таких характеристик показана на рис. 14.21, а [29]. Она состоит из ОУ 1,2с ограничительной диодной цепочкой в обратной связи, сумматора на ОУ 3, источников постоянного напряжения U1.U2 и цепи положительной обратной связи (ПОС), образованной делителем на потенциометре R и резисторами R13, R23. Напряжение U3 на подвижном контакте потенциометра при указанном на рис. 14.21, а положении этого контакта (50% от правого контакта потенциометра) составляет 0,5Uo. Для улучшения формы передаточной характеристики и получения других эффектов нами был введен конденсатор С в цепи обратной связи ОУ сумматора.

Передаточная характеристика схемы при указанных на ней значениях параметров показана на рис. 14.21, б. Она формируется следующим образом. Поскольку ¦U1¦=¦U2¦>Us (Us — напряжение срабатывания ограничивающей диодной цепочки, равного, как и для ранее рассмотренных схем, ориентировочно 1,6 В), то при t<0,
т.е. перед пуском, напряжения на выходах ОУ 1 и 2 будут соответственно равны -U, и +U, и на выходе сумматора Uo=0. После пуска, когда напряжение генератора geni достигнет значения -U1 (см. осциллограмму на рис. 14.21, в), напряжение на выходе ОУ1 скачком изменится до значения +Us т.е. на входе сумматора будут действовать два напряжения +U, и, следовательно, его выходное напряжение Uo равно -2U, (примерно 2,6 В). При этом сформируется (см. рис. 14.21, б) горизонтальная и вертикальная часть передаточной характеристики в третьем квадранте, после чего начинается формирование ее плоской части. Одновременно на входы ОУ1 и ОУ2 по цепи ПОС подается напряжение -KnUo (Кn — коэффициент ПОС, равный в данном случае 0,5), т.е. на входе ОУ1 будет действовать в качестве ограничительного уже не U1, а напряжение Ul-KnUo = Ul- 2KnUs (около 0.7 В). Когда после формирования плоской части передаточной характеристики выходное напряжение генератора geni (см. рис. 14.21, в) достигнет этого напряжения, выходное напряжение ОУ 1 скачком изменится до значения -U„ схема возвращается в исходное состояние и формирование передаточной характеристики в третьем квадранте завершается. Формирование характеристики в первом квадранте происходит аналогичным образом с той лишь разницей, что при ее формировании участвует только ограничитель на ОУ 1.
Передаточной характеристикой типа показанной на рис. 14.21, б обладают трехпозиционные, например, поляризованные реле, имеющие три положения контактной системы: среднее (в обесточенном состоянии) и два крайних, соответствующих двум направлениям токов в обмотке. Реле характеризуются током или напряжением срабатывания (в рассмотренной схеме имитируется напряжениями U1 и U2) и током или напряжением отпускания (имитируется напряжениями U1-2KnUs и -U1+2KnUs). Отношение тока (напряжения) отпускания к току (напряжению) срабатывания называют коэффициентом возврата реле [38].
Схема на рис. 14.21, а позволяет воспроизводить не только релейные характеристики, но и близкие к кривым намагничивания магнитных материалов гистере-зисные передаточные характеристики. В качестве примера на рис. 14.22 приведена такая характеристика, полученная при напряжениях ограничения U1=U2=0 В, коэффициенте ПОС Кn= 0,2 и емкости конденсатора С=0,2 мкФ.
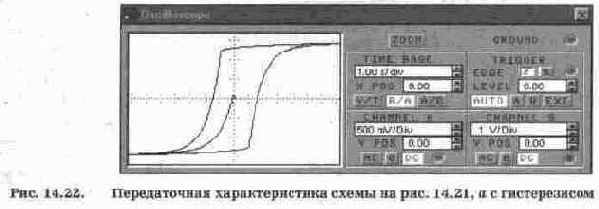
Моделирование сухого трения. Сухое (кулоново) трение в кинематических парах проявляется по-разному. В некоторых случаях оно может воспроизводиться передаточной характеристикой, показанной на рис. 14.17, в, в других — гистерезисной кривой (как у люфта). В случае вращательного движения такое звено характеризуется нелинейной зависимостью момента сухого трения от угловой скорости, а в случае поступательного движения — нелинейной зависимостью силы сухого трения от поступательной скорости перемещения. Представление этой зависимости в виде релейной характеристики на рис. 14.17, в справедливо только для случая, когда момент (или сила) сухого трения имеет постоянное значение независимо от величины скорости или когда вращающий момент при трогании механизма существенно превосходит момент сухого трения. Если вращающий момент при этом меньше максимально возможного значения момента сухого трения, то последний может принимать различные (в том числе и непредсказуемые) значения в диапазоне от минимального до максимального. В различных системах влияние сухого трения на процесс регулирования может быть самым разнообразным. Во многих случаях оно дает полезный эффект демпфирования колебаний. В некоторых особых случаях оно может служить причиной возникновения нежелательных колебаний, в частности, автоколебаний. Часто сухое трение может быть причиной различных застоев и нечувствительности регулятора к малым отклонениям. Оно может иногда вызывать неплавное движение с задержками и рывками и т.п.
В заключение рассмотрим компоненты программы EWB 4.1, которые могут быть использованы для воспроизведения характеристик элементов автоматических систем. К таким моделям могут быть отнесены в первую очередь устройства умножения и деления. Множительное устройство было рассмотрено в гл. 13 при моделировании модулятора амплитудно-модулированных колебаний и преобразователя частоты. Схема для демонстрации работы устройства деления показана на рис. 14.23, а, а диалоговое окно для задания его параметров — на рис. 14.23, б. На вход Y элемента подается делимое, а на вход Х — делитель. Выходное напряжение устройства Uo=KY/X, где К — коэффициент передачи устройства (индицируется над графическим изображением компонента), задаваемый в диалоговом окне на рис. 14.23, б. Как видно из рис. 14.23, а, показания включенного на выходе вольтметра соответствуют расчетному значению Uo с учетом знака делителя.
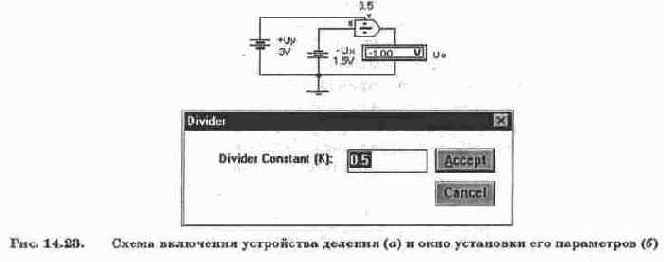
Контрольные вопросы и задания
1. Какую передаточную характеристику имеет звено с ограничением координат? Приведите пример такого звена.
2. Какие элементы в схеме на рис. 14.17, а используются для формирования области ограничения на передаточной характеристике?
3. Получите передаточные характеристики схемы на рис. 14.17, а при напряжении стабилизации стабилитронов 3, 5 и 10 В. Каким образом можно выполнить ограничивающую цепь на обычных диодах?
4. Чем отличается модель звена с зоной нечувствительности от модели звена с ограничением координат?
5. Получите передаточные характеристики схемы на рис. 14.18, а при напряжении стабилизации стабилитронов 3, 5 и 10 В.
6. Приведите пример механической передачи с люфтом. Какой характеристикой обладает такое звено и к каким эффектам приводит его использование в системах управления?
7. С помощью каких элементов в схеме на рис. 14.19, а формируется ширина гистерезиса, имитирующая зону нечувствительности звена с люфтом?
8. К какому типу релейных элементов можно отнести элемент с передаточной характеристикой на рис.14.17, в?
9. Что такое коэффициент возврата реле?
10. Каким образом в схеме на рис. 14.21, а задается напряжение срабатывания реле?
11. Получите передаточную характеристику схемы на рис. 14.21, а при U1=3 В и U2=0 В. Какому типу реле соответствует полученная характеристика?
12. Каким образом в схеме на рис. 14.21, а задается напряжение отпускания реле?
13. С помощью какой схемы можно воспроизвести кинематическую пару с сухим трением? Разработайте модель для случая, когда момент на ведущем валу (на ведущей шестерне) меньше момента трения.
Примеры использования моделей с релейными характеристиками
Учет влияния нелинейностей в любой системе автоматического управления встречает большие трудности, поскольку приходится сталкиваться с решением нелинейных дифференциальных уравнений высоких порядков. В большинстве случаев учет нелинейностей не может быть выполнен в общем виде и позволяет пользоваться лишь частными решениями, выполняемыми с той или иной степенью приближения. Поэтому большую роль приобретают различные упрощенные и приближенные методы, при помощи которых можно получать ответы лишь на отдельные интересующие исследователей вопросы (устойчивость в определенных условиях, наличие автоколебаний, поведение системы в каком-либо частном режиме, например, при установившейся скорости, при трогании с места и т.п.).
В настоящее время разработано большое число приближенных методов исследования нелинейных систем автоматического управления. Дадим краткую характеристику тем из них, которые получили наибольшее распространение при решении практических задач.
Метод малых отклонений. Этот метод используется для исследования устойчивости систем по Ляпунову. При этом составляются уравнения для малых отклонений от состояния равновесия либо от установившегося движения, причем исследуется устойчивость данного состояния равновесия или данного движения. Если считать, что все отклонения достаточно малы, то можно пренебречь в первом приближении их высшими степенями и произведениями. Тогда получаются уравнения первого приближения, которые и могут быть подвергнуты исследованию на устойчивость при учете той или иной нелинейности.
Методы аппроксимации. В этом случае решение уравнений находят, заменяя характеристику нелинейного элемента некоторой близкой к ней кривой, которая может быть записана в аналитической форме.
Методы малого параметра. Метод возник в небесной механике в связи с решением задачи о трех телах. Основные исследования по этому методу принадлежат французскому математику Пуанкаре. В дальнейшем были разработаны различные варианты метода малого параметра, применяемые в радиотехнике и теории автоматического управления. Наиболее известными являются методы Ляпунова, Рэйля и Ван-дер-Поля. Метод последнего был строго обоснован Мандельштамом, Папалекси и Андроновым.
Общая идея метода малого параметра основана на том, что ряд членов, входящих в левую часть дифференциальных уравнений нелинейных систем, можно в ряде случаев считать малыми по сравнению с остальными членами, определяющими характер движения системы. Метод позволяет определить приближенные значения амплитуды и частоты основной гармоники периодических колебаний при гармонических возмущениях на входе системы, что позволяет рассчитать коэффициент усиления нелинейного звена по первой гармонике.
Численно-графические методы. Исследование нелинейной системы производится путем численных и графических способов интегрирования нелинейных дифференциальных уравнений, например, интегрирование по разностному методу Адамса—Штермера, способ приближенного интегрирования Чаплыгина, метод Эйлера, который является одним из наиболее простых методов. Он положен в основу почти всех графических способов, отличающихся друг от друга только по характеру геометрических построений. К более простым методам относятся метод секущих, метод касательных и метод с использованием решения уравнений в конечных разностях.
Метод фазовых траекторий. Метод основан на понятии фазового пространства. Он отличается наглядностью и возможностью получения полного представления характере возможных состояний системы. Сущность его заключается в следующем. Пусть система описывается дифференциальным уравнением n-го порядка. Ее состояние может быть задано п числами, определяющими координаты некоторой точки в га-мерном пространстве, причем каждой точке этого пространства будет соответствовать одно определенное состояние (определенная фаза) системы. Поэтому такое пространство называется фазовым. Для систем, описываемых дифференциальным уравнением второго порядка, фазовое пространство является двухмерным и в этом случае оно превращается в фазовую плоскость, на которой по двум осям координат (X,Y) откладываются какие-либо две переменные, характеризующие поведение данной системы в динамике (в переходном процессе). В качестве таких переменных чаще всего используется отклонение регулируемой величины Х (откладывается по оси X) и ее первая производная X', т.е. скорость изменения этого отклонения (откладывается по оси Y). В случае колебательного процесса с постоянными амплитудой и частотой, когда корни характеристического уравнения системы являются чисто мнимыми, изображение на фазовой плоскости будет представлять собой замкнутый контур — замкнутую фазовую траекторию, например, в виде эллипса. Каждому периоду колебаний соответствует прохождение изображающей точкой всего контура. В случае затухающего колебательного процесса (корни характеристического уравнения имеют отрицательную вещественную часть) изображение на фазовой плоскости будет иметь вид сходящейся к началу координат (или к определенному установившемуся значению при наличии внешнего возмущения) спиралевидной фазовой траектории и расходящейся — при расходящемся колебательном процессе (корни с положительной вещественной частью, система неустойчива).
Следует заметить, что фазовые траектории представляют собой геометрическое отражение процессов динамики в системе. В это отражение входят лишь координаты и отсутствует время. Поэтому фазовая траектория сама по себе дает лишь качественное представление о характере поведения системы. Чтобы получить количественное положение изображающей точки в любой момент времени, нужно найти тем или иным способом решение переходного процесса во времени.
Методы моделирования. Являются наиболее эффективным средством анализа и синтеза, поскольку не требуют громоздких вычислений и графических построений, особенно в случае сложных нелинейных систем управления. Рассмотрим наиболее простые примеры систем, содержащих нелинейности релейного типа, рассмотренные в предыдущем разделе.
Модель потенциометрического датчика перемещения. Потенциометрические (реостатные) датчики широко применяются в системах управления и контроля, в частности, в уровнемерах (в том числе и бензобаках автомобилей), в которых поплавок связан с подвижным контактом, перемещающимся по виткам проволочного резистора. Перемещение подвижного контакта вызывает скачкообразное изменение сопротивления на величину сопротивления одного витка, что в общем случае является признаком наличия нелинейности в таком датчике.
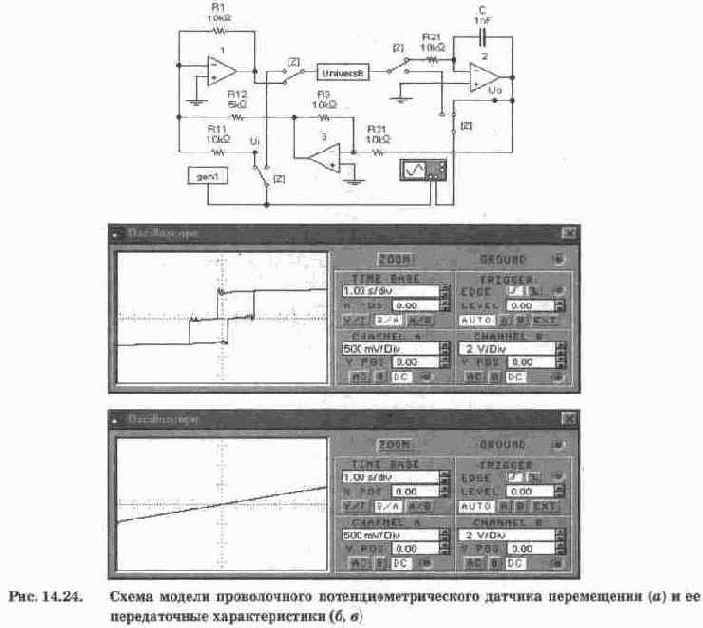
Схема модели потенциометрического датчика с использованием модели релейного элемента на рис. 14.21, а (для имитации скачкообразного изменения сопротивления при переходе подвижного контакта с витка на виток) показана на рис. 14.24, а [29]. Схема модели состоит из сумматора на ОУ 1, интегратора на ОУ 2, инвертирующего усилителя на ОУ 3, счетверенного переключателя Z, управляемого одноименной клавишей, и модели релейного звена (рис. 14.21, а), представленного подсхемой UniversR и имеющего передаточную характеристику, показанную на рис. 14.24, б. Характеристика получена при U1=U2=1 В, Кn=0,4 и С=100 пФ в положении переключателей Z, показанном на рис. 14.24, а.
Моделирование собственно потенциометрического датчика производится после перевода переключателей Z в положение, противоположное показанному на рис. 14.24, а. Результаты моделирования показаны на рис. 14.24, б, в. Полученная передаточная характеристика представляет собой многоступенчатую прямую линию. Согласно [29], величина ступеньки по горизонтали (входное напряжение Ui) равна UcpR11/R1, по вертикали (выходное напряжение Uo) — UcpR12R31/RlR3, скорость нарастания ступеньки — Us/CR21. Как следует из рис 14.24, б, напряжение срабатывания релейного элемента Ucp и напряжение срабатывания диодной цепочки Us примерно равны 1,1 и 2,4 В.
Релейная система автоматического регулирования [29]. Уравнение релейной системы задается в следующем виде:

где p=d/dt — оператор дифференцирования.
Функция F(X) задается в виде передаточной функции на рис. 14.21, б с параметрами (в относительных единицах): напряжение срабатывания Ucр=1, напряжение отпускания Uoтп=0,6, выходная амплитуда (напряжение срабатывания диодной цепочки) Us=1. Задачей моделирования является определение характера переходных процессов при начальных условиях Х(0)=1, Х'(0)=0 и следующих значениях коэффициента К: 304, 400, 200 и 100.
Схема модели приведена на рис. 14.25, а. Ее параметры выбираются таким же образом, как и в разделе 14.1. Начнем с составления уравнений для выходного напряжения каждого блока. В данном случае они будут определяться выражениями:
О для сумматора на ОУ 1 U1=-(K11-U6+K12-A2-U3+K13.A1-U4);
О для первого интегратора на ОУ 2 U2=-K21-Ul/p;
О для второго интегратора на ОУ 3 U3=-K31-U2/p;
О для масштабирующего усилителя на ОУ 4 U4=-K41-U2;
О для релейного элемента U6=-F(U3).
С помощью приведенных формул получаем:

После преобразования переменных путем введения масштабов X=MxU3 и X1=M1xU6 будем иметь:

Примем Mx=X(0)/U3=1/10=0,1 и Мx=М1x=0,1. В таком случае из сопоставле ния исходного (14.22) и машинного (14.23) уравнений получаем выражения для вы бора параметров модели в следующем виде:

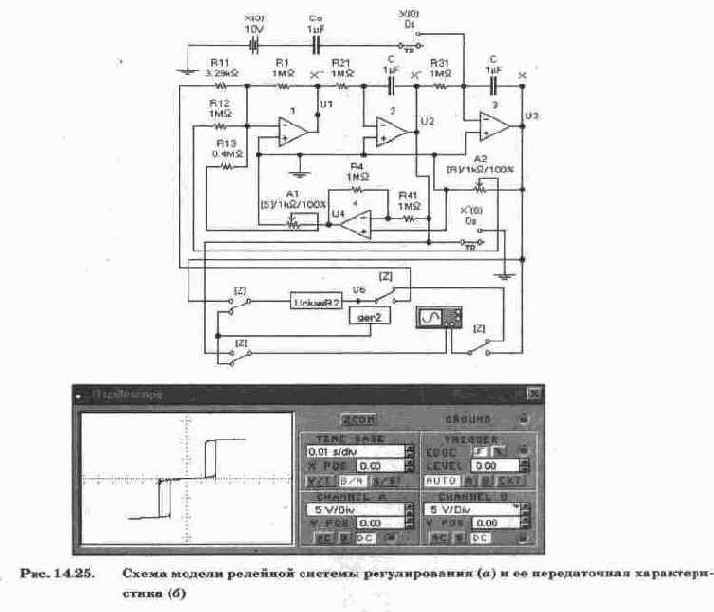
Задаемся значениями коэффициентов передачи К12=К41=1, что соответствует выбору сопротивлений резисторов R1=R12=R4=R41=1 MOM. Задаемся также значениями коэффициентов деления делителей А1=А2=1 на потенциометрах с одноименными позиционными обозначениями (установлены на 100%) и коэффициентами передачи К21=К31=1 с, что при С=1 мкФ соответствует выбору сопротивлений резисторов R21=R31=1 МОм. При указанном выборе для обеспечения коэффициента 2,5 в уравнении (14.22) коэффициент передачи К13 должен быть равен, как следует из условий (14.24), 2,5, т.е. сопротивление резистора R13=1/2,5=0,4 МОм. Для обеспечения заданного значения коэффициента К=304 сопротивление резистора R11 должно быть равно R1/304=3,29 кОм, для К=400 — 2,5 кОм, для К=200 — 5 кОм, для К=100 — 10 кОм. Для введения начального условия Х(0)=10 В (с учетом принятого масштаба) в схеме используется источник заряда, образованный источником постоянного напряжения Х(0) и конденсатором Со и подключаемый на короткое время (0,06 с) после запуска моделирования ко входу интегратора на ОУ 2 с помощью программного переключателя Х(0), установленные параметры которого Топ=0 и Toff =0,06 с выбраны опытным путем из условия обеспечения Х(0)=10 В за минимально возможное короткое время. Введение условия Х'(0) достигается закорачиванием на короткое время (0,06 с) после пуска выхода ОУ 2 на общую шину с помощью программного переключателя Х'(0), параметры которого выбраны аналогичными переключателю Х(0).
В качестве релейного элемента в схеме на рис. 14.25, а использована схема на рис. 14.21, а, оформленная в виде подсхемы UniverR2 и имеющая, согласно условиям задачи и принятому масштабу, следующие параметры (см. рис. 14.25, б): напряжение срабатывания Ucp=10 В, напряжение отпускания Uотп=6 В, выходное напряжение (напряжение срабатывания диодной цепочки) Us=10 В. Для обеспечения такого значения U. напряжение стабилизации стабилитронов было установлено равным 5,5В. Для возможности оперативного изменения параметров модели релейного элемента и наблюдения ее передаточной характеристики в схеме на рис. 14.25, а предусмотрен счетверенный переключатель Z, показанный в положении контроля релейного элемента, и генератор одиночного треугольного сигнала gen2, отличающийся от gen1 только тем, что в нем установлено U1=U2=10 В (см. схему на рис. 14.14, а).
Для проведения моделирования переключатель Z нажатием клавиши Z необходимо перевести в противоположное показанному на рис. 14.25, а положение. При этом на входы осциллографа подаются сигналы Х (канал В, ось Х прямоугольных координат) и ее первая производная X' (канал А, ось Y), т.е. на экране осциллографа мы получаем фазовую траекторию (или фазовый портрет) исследуемой системы, которая для различных значений коэффициента К показана на рис. 14.26.
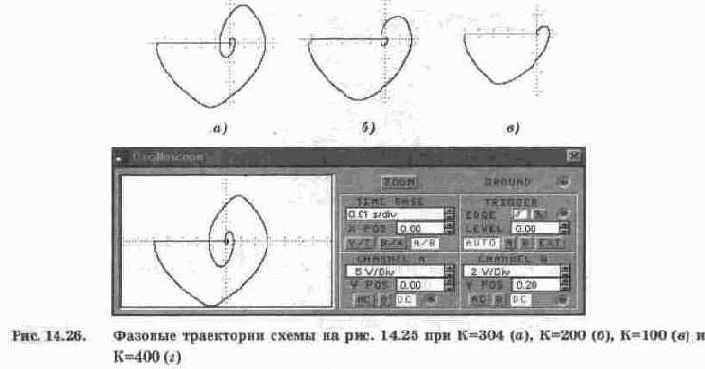
Из рис. 14. 26 видно, что для всех значений К фазовые траектории имеют вид сходящихся к началу координат спиралей. Следовательно, переходной процесс в рассматриваемой системе носит затухающий колебательный характер, причем размах колебаний и, следовательно, длительность переходного процесса уменьшается с уменьшением коэффициента К, определяющего влияние релейного элемента.
Контрольные вопросы и задания
1. В чем заключается основное различие между линейными и нелинейными системами автоматического регулирования?
2. Назовите приближенные методы анализа автоматических систем. В чем заключается сущность метода фазовых траекторий?
3. Какой тип нелинейности используется при моделировании потенциометричес-кого датчика перемещения?
4. Какие функции выполняют решающие блоки на ОУ 2 и 3 в модели потенциоме-трического датчика?
5. Если выбрать коэффициент деления А2=0,5 на одноименном потенциометре, то как это скажется на выборе коэффициентов передачи других блоков в схеме на рис. 14.25, а?
6. Если из схемы на рис. 14.25, а исключить устройства для ввода начальных условий (Х(0) и Х'(0)), то как это скажется на результатах моделирования? Ответ проверьте на модели.
7. Отключите в схеме на рис. 14.25, а устройства ввода начальных условий. Подключите к суммирующему узлу сумматора на ОУ 1 через резистор R14=1 MOM источник постоянного напряжения. Установите зависимость фазовых траекторий схемы при К=100 и 400 от напряжения подключенного источника, выбрав его равным 1, 3, 10 и 12 В.
8. К схеме на рис. 14.3 осциллограф подключите таким образом, чтобы можно было получать ее фазовый портрет (фазовые траектории). Проведите сравнительный анализ фазовых траекторий для этой схемы при колебательном и апериодическом переходном процессе.
9. В некоторых случаях задаваемые параметры моделирования (например, коэффициент К в схеме на рис. 14.25, а) могут меняться в достаточно широких пределах, что может привести к дополнительной нелинейности в виде насыщения ОУ. Для предотвращения таких явлений используют масштабирование не только по напряжению, но и по времени. Для примера для схемы на рис. 14.25, а введем масштаб времени Mt=t/T=l/3. В этом случае в уравнении (14.22) оператор p=d/dt станет равным 3(d/dT), а само уравнение, разрешенное относительно старшей производной, примет следующий вид:

В таком случае первые три условия из (14.24) запишутся следующим образом:

Используя выражения (14.25), выберите коэффициенты передачи для схемы на рис. 14.25, а и проведите моделирование при указанных выше значениях коэффициента К. Полученные результаты сравните с данными, приведенными на рис. 14.26.
10. Измерьте время моделирования от момента пуска до момента прихода отображающей точки фазовой траектории в начало координат для указанных значений коэффициента К. Для измерения времени воспользуйтесь счетчиком, табло которого находится рядом с выключателем и который запускается одновременно с запуском моделирования. Для получения отсчета в секундах показания счетчика необходимо умножить примерно на 10. Полагая, что измеренное таким образом время определяет время переходных процессов, определите, при каком значении коэффициента К оно минимально.
в качестве моделей элементов автоматических
Большинство компонентов программы EWB 5.0, которые могут быть использованы в качестве моделей элементов автоматических устройств, сосредоточены в библиотеке Controls. Полиномиальный источник, который мы рассматривали в раз-


деле 14.2 в качестве универсального преобразователя, в EWB 5.0 отнесен в каталог библиотеки Sources и ничем не отличается от аналогичного устройства программы EWB 4.1. Из других компонентов была выбраны только модель двигателя постоянного тока из библиотеки Miscellaneous и управляемый источник напряжения из библиотеки Sources. Рассмотрение начнем с компонентов библиотеки Controls.
Поскольку устройства масштабирования, суммирования, интегрирования и дифференцирования уже рассматривались в гл. 10, то ниже по этим устройствам будут приведены самые краткие данные.
Масштабирующий блок. Схема включения блока показана на рис. 14.27, а. Его параметры задаются с помощью диалогового окна на рис. 14.27, б, в котором можно задать коэффициент усиления К, постоянную составляющую на входе VIOFF и выходе VOOFF. По постоянной составляющей выходное напряжение блока Uo=K-VIOFF+VOOFF с учетом знаков входящих в формулу составляющих. При указанных в диалоговом окне значениях параметров справедливость формулы иллюстрируется результатами осциллографических измерений на рис. 14.27, в, откуда видно, что разность между амплитудами положительной и отрицательной полуволн синусоиды (величины VB1 и VB2) составляет 4 В, т.е. постоянная составляющая равна 2 В, что соответствует расчетному значению.
Итегрирующий блок. Схема включения блока показана на рис. 14.29, а. Его параметры задаются с помощью диалогового окна на рис. 14.29, б, в котором К — коэффициент усиления; VIOFF — напряжение постоянной составляющей на входе;
VL,VU — предельные значения выходного напряжения отрицательной и положительной полярности; VS — скорость изменения выходного напряжения; VOIC — начальное напряжение на выходе. Параметры VIOFF и VOIC служат для установки начальных условий (в схеме на рис. 14.25, а мы использовали для этой цели специальные устройства). При значениях параметров, приведенных на рис. 14.29, а, б, результаты моделирования показаны на рис. 14.29, в.
Дифференцирующий блок. Схема включения блока показана на рис. 14.30, а, диалоговое окно для установки его параметров — на рис. 14.30, б, в котором параметр К — коэффициент усиления; VIOFF — напряжение постоянной составляющей

Итегрирующий блок. Схема включения блока показана на рис. 14.29, а. Его параметры задаются с помощью диалогового окна на рис. 14.29, б, в котором К — коэффициент усиления; VIOFF — напряжение постоянной составляющей на входе;
VL,VU — предельные значения выходного напряжения отрицательной и положительной полярности; VS — скорость изменения выходного напряжения; VOIC — начальное напряжение на выходе. Параметры VIOFF и VOIC служат для установки начальных условий (в схеме на рис. 14.25, а мы использовали для этой цели специальные устройства). При значениях параметров, приведенных на рис. 14.29, а, б, результаты моделирования показаны на рис. 14.29, в.
Дифференцирующий блок. Схема включения блока показана на рис. 14.30, а, диалоговое окно для установки его параметров — на рис. 14.30, б, в котором параметр К — коэффициент усиления; VIOFF — напряжение постоянной составляющей
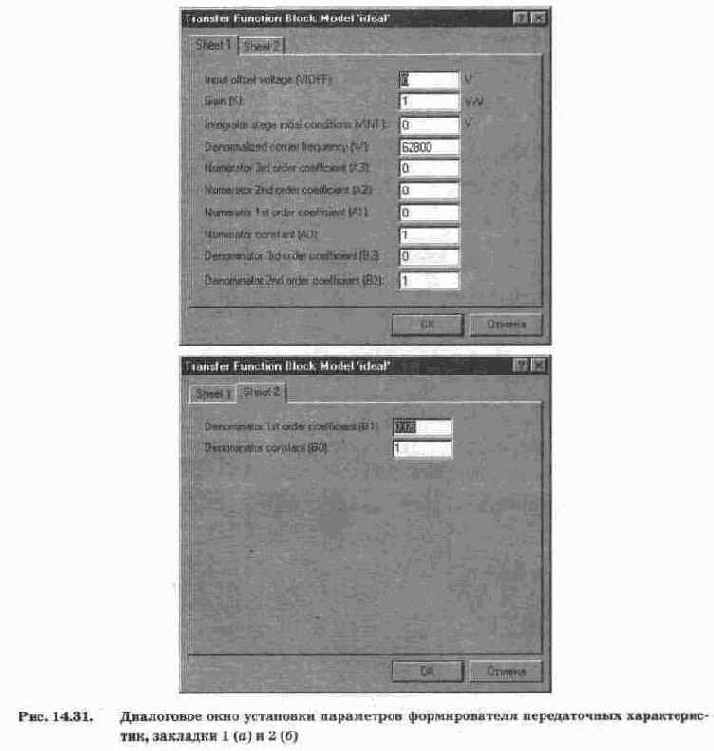
на входе; VL,VU — предельные значения выходного напряжения отрицательной и положительной полярности; VS — скорость изменения входного напряжения. При значениях параметров, приведенных на рис. 14.30, а, б, результаты моделирования показаны на рис. 14.30, в.
Формирователь передаточных характеристик. Этот компонент позволяет формировать передаточные характеристики в соответствии с выражением:

где р — оператор Лапласа.
Коэффициенты полиномов А, В и коэффициент усиления К задаются с помощью диалогового окна в виде двух закладок на рис. 14.31. В окне на рис. 14.31 мож но также задать смещение на входе (постоянную составляющую) VIOFF, установку начальных условий в режиме интегратора VINT (коэффициент В1—1, остальные коэффициенты полиномов равны нулю) и угловую частоту среза W.
Схема включения формирователя показана на рис. 14.32, а. Его входные зажимы обозначены цифрами 1 и 2, выходные — цифрами 3 и 4. В качестве контрольно-измерительного прибора использован измеритель АЧХ-ФЧХ.
При указанных на рис. 14.31 значениях параметров получаем передаточную характеристику звена второго порядка в следующем виде: К(р)=1/(р+0,05р+1). Результаты моделирования этой передаточной характеристики при выбранной частоте среза 62800 рад/с (10 кГц) показаны на рис. 14.32, б. Коэффициент передачи на резонансной частоте (частоте среза) при этом равен 1/B1=1/0,05=20=26 дБ, что совпадает с измеренным значением.
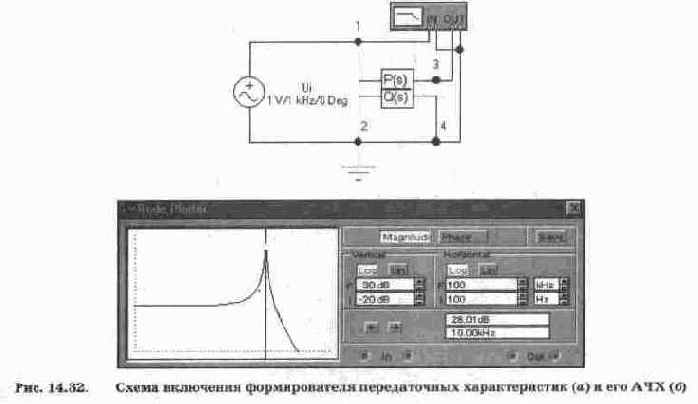
Испытания формирователя при значениях параметров по умолчанию (АО=ВО=0, К=1, W=1, остальные параметры с нулевым значением) показали, что он позволяет микшировать (объединять) сигналы от трех источников. Если в качестве выходного использовать вывод 3, то сигнал с вывода 2 будет передаваться с инверсией, а с выводов 1 и 4 — без инверсии, при этом неиспользуемые входы можно не заземлять (пример такого применения см. на рис. 14.36, а).
Модель с ограничением координат по входу и выходу. Схема включения ограничителя, который может быть использован для имитации звена с ограничением координат, показана на рис. 14.33, а, диалоговое окно установки его параметров — на рис. 14.33, б, передаточная характеристика при указанных в окне параметрах — на рис. 14.33, в. В качестве источника испытательного сигнала используется импортированная из EWB 4.1 схема генератора одиночного треугольного сигнала genlewb (см. рис. 14.14, а). Как видно из рис. 14.33, в, насыщение наступает при выходном напряжении, определяемом заданными в диалоговом окне нижним VL и верхним VU уровнем ограничения. На линейном участке выходное напряжение определяется выражением Uo=K(Ui+VIOFF) с учетом знаков входного напряжения Ui и задан-
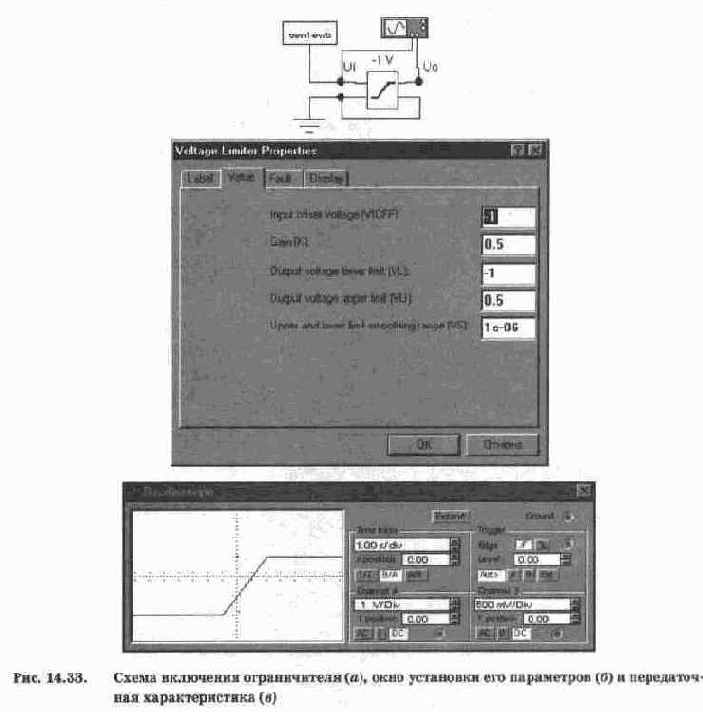
ного напряжения смещения VIOFF. При увеличении коэффициента усиления К необходимо, чтобы скорость изменения выходного напряжения от значения VL до VU не превышала заданной в окне величины VS.
Следует отметить, что рассмотренная схема является достаточно универсальной. Так, например, за счет увеличения коэффициента К можно имитировать релейный элемент. Передаточная характеристика для такого случая показана на рис. 14.34, а. Она получена при установке следующих значений параметров:
VIOFF=0 В; К=1000; VL=-1 В; VU=1 В; VS=0,0001 В/с. Если в этой установке выбрать VIOFF=-1 В, К=0,5 и VL=0 В, то получим характеристику звена с зоной нечувствительности при Ui<l В, показанную на рис. 14.34, б.
Модель звена с гистерезисной характеристикой. Схема для испытаний библиотечного компонента с гистерезисной характеристикой показана на рис. 14.35, а, диалоговое окно установки параметров — на рис. 14.35, б, а передаточная характе-
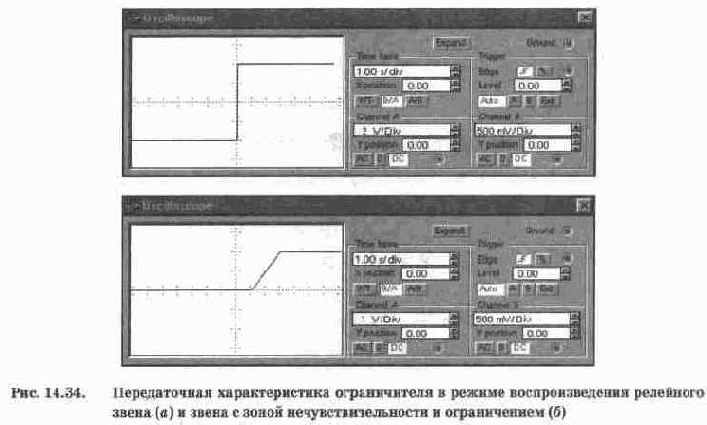
ристика при указанных в окне значениях параметров — на рис. 14.35, в. В качестве источника испытательного сигнала Ui использован генератор одиночного треугольного сигнала genlewb.
Формирование передаточной характеристики рассматриваемой схемы начинается с ограничения выходного напряжения снизу по заданному значению параметра VOL, равного в данном случае -1 В (см. рис. 14.35, в). Когда входное напряжение Ui достигает значения VIL, начинается формирование правой вертикальной ветви характеристики. Когда входное напряжение достигает значения VIH, начинается формирование верхнего участка насыщения по заданному уровню ограничения сверху VOH=1 В. Левая вертикальная ветвь характеристики формируется по заданному значению напряжения Н=1 В ширины гистерезиса.
Параметр ISD диалогового окна позволяет задать коэффициент нелинейности вертикальных ветвей характеристики. При указанных на рис. 14.35, б значениях параметров и ISD=50% передаточная характеристика схемы принимает вид кривой намагничивания (рис. 14.35, г).
На рис. 14.36, а показана схема, которая позволяет воспроизвести передаточную характеристику, близкую по характеру к характеристике на рис. 14.21, б. Схема содержит два блока с гистерезисной характеристикой. Для элемента 1, формирующего левую часть характеристики, значения параметров были выбраны следующими: VIL=-3 (1) В; VIH=-2 (2); Н=0,5 (0,2) В; VOL=-1 (0) В; VOH=0 (1); IDS=0 (0)%. Для элемента 2, формирующего правую часть характеристики, значения параметров приведены в скобках. Выходы элементов 1 и 2 объединены с помощью формирователя передаточных характеристик. Передаточная характеристика показана на рис. 14.36, б.
Из приведенных данных нетрудно видеть, что наклон гистерезисных кривых определяется соотношением значений параметров VIL и VIH: чем меньше сумма их абсолютных значений, тем меньше наклон характеристики. В некоторых случаях

такая зависимость может быть использована, например, для воспроизведения времени переключения реле, определяемого временем перемещения подвижного контакта реле, или для воспроизведения производственного разброса реле по напряжению срабатывания.

Множительное устройство. Схема включения показана на рис. 14.37, а, диалоговое окно установки параметров — на рис. 14.37, б. Выходное напряжение устройства определяется выражением:

где К — общий коэффициент передачи (см. рис. 14.37, б); YK, ХК — коэффициенты передачи по входам Y и X; YOFF,XOFF, OFF — постоянная составляющая (или смещение нулевого уровня) соответственно на входах Y, Х и выходе.
Значение входящих в формулу параметров подставляются с учетом их знаков. После подстановки указанных на рис. 14.37, б значений параметров получим результат, индицируемый на табло подключенного к выходу вольтметра.
Как видно из проведенного рассмотрения, множительное устройство в программе EWB 5.0 существенно отличается от аналогичного компонента EWB 4.1 по ' количеству задаваемых параметров (в EWB 4.1 задавался только общий коэффициент передачи).
Делительное устройство. Схема включения устройства показана на рис. 14.38, а, диалоговое окно установки параметров — на рис. 14.38, б. Выходное напряжение устройства определяется выражением:

Входящие в формулу параметры имеют аналогичное с множительным устройством назначение. Указанные на рис. 14.38, б параметры XLOWLIM (ограничение на минимальное значение X) и XCD (параметр сглаживания) на результат влияния не оказывали при изменении их значения от 0 до 100 (значение 100 — по умолчанию для обоих параметров).
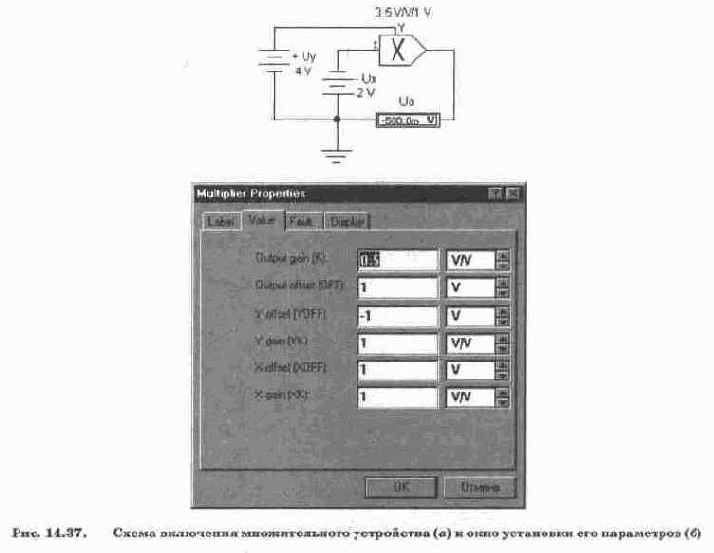
Значения входящих в формулу параметров подставляются с учетом их знаков. После подстановки указанных на рис. 14.38, б значений параметров получим результат, индицируемый на табло вольтметра.
Модель с управляемым ограничением координат. Схема включения блока с управляемыми параметрами ограничения (управляемого ограничителя) показана на рис. 14.39, а, окно установки параметров — на рис. 14.39, б, передаточная характеристика — на рис. 14.39, в. Блок отличается от вышерассмотренного тем, что напряжение ограничения сверху и снизу может быть задано с помощью внешних управляющих сигналов, источниками которых в данном случае являются источники постоянного напряжения Uu и Un. Напряжение ограничения может быть скорректировано установкой в диалоговом окне соответствующих значений параметров VOUD (для ограничения сверху) и VOLD (для ограничения снизу). Влияние параметра ULSR на передаточную характеристику в данном случае не обнаружено.
Рассмотренная схема ограничителя может быть использована для воспроизведения звена с сухим трением для случая, когда момент на ведущем валу (при передаче вращательного движения) меньше момента трения. В этом случае напряжение, имитирующее момент на валу, должно быть подано на основной вход модели, а на входы U и L — парафазное (на случай реверса) напряжение от генератора шума, имитирующего момент сухого трения.

Селектор сигналов по знаку первой производной. Схема включения селектора показана на рис. 14.40, а, диалоговое окно установки параметров — на рис. 14.40, б. Переключатель Z используется для переключения фазы входного сигнала (у функционального генератора парафазный выход) с целью оперативного изменения режимов отображения работы рассматриваемого компонента на экране осциллографа. Режим работы селектора задается установкой в ноль или единицу параметров RSMAX (регистрация нарастающих сигналов с запоминанием положительной амплитуды) и FSMAX (регистрация спадающих сигналов с запоминанием отрицательной амплитуды). При комбинации 11 сигнал передается на выход селектора без ослабления и искажений. При комбинации 10 (ключ Z находится в показанном на рис. 14.40, а положении) на выход передается нарастающая часть периода входного сигнала (или передний фронт в случае импульсного сигнала) с запоминанием его положительной амплитуды (см. рис. 14.40, в). При комбинации 01 (ключ Z переводится в противоположное положение) на выход передается ниспадающая часть входного сигнала с запоминанием его отрицательной амплитуды (см. рис. 14.40, г). При комбинации 00 на выход передается только амплитудное значение сигнала соответствующей его фазе полярности, т.е. в зависимости от положения ключа Z.
Из сравнения полученных в этом разделе передаточных характеристик моделей нелинейных компонентов с аналогичными характеристиками, полученными в разделе 14.3, видно, что они обладают более "идеальной" формой, однако они не могут быть использованы в качестве реальных звеньев систем управления.
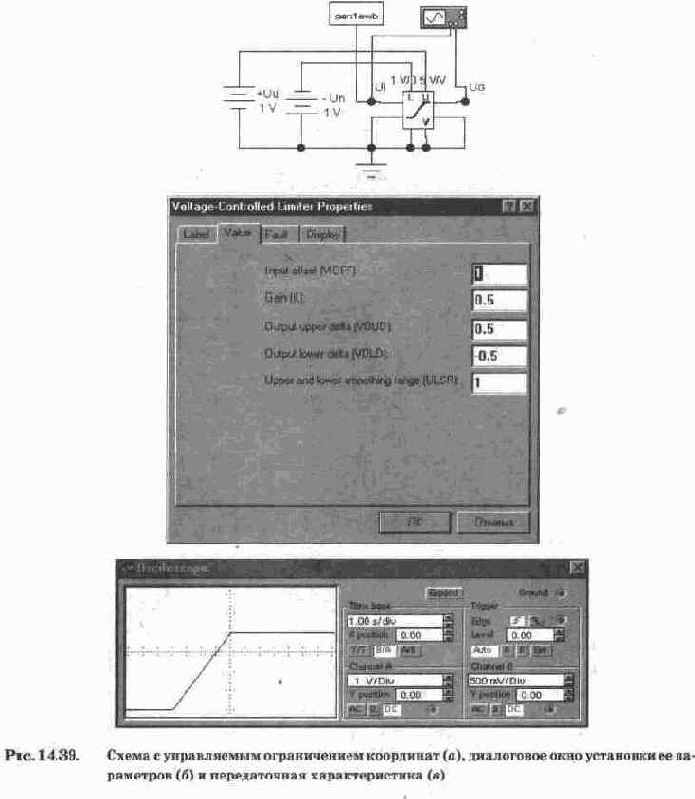
Модель электродвигателя постоянного тока. Электродвигатели такого типа применяются в качестве исполнительных органов автоматических систем управления. Различают три схемы их включения [63]: с параллельным (шунтовым), последовательным (сириесным) и независимым возбуждением, показанные соответственно на рис. 14.41, 14.42 и 14.43. Сама модель электродвигателя содержит обмотку возбуждения, якорь и выходной вал, с которого снимается сигнал Uo. В качестве источника входного (испытательного) сигнала Ui используется источник линейно нарастающего напряжения положительной полярности (модель допускает использование напряжения питания только положительной полярности), выпол-
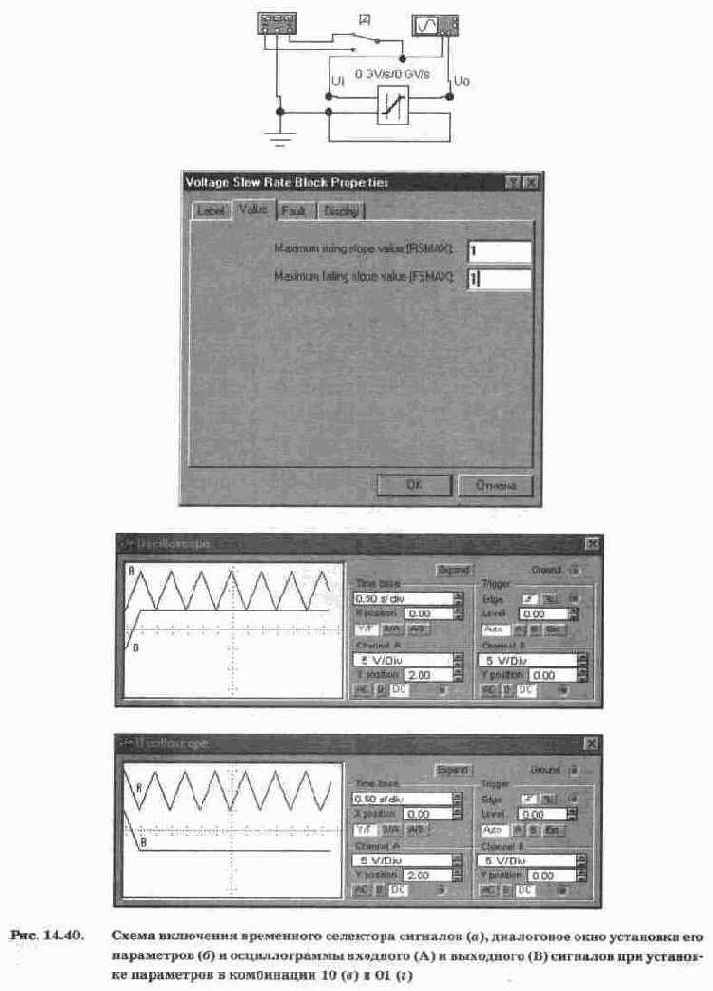
ненный на рассмотренной выше схеме интегратора с источником постоянного напряжения U. Параметры интегратора выбраны следующим образом: К=1, VIOFF=VOIC=0, остальные — по умолчанию. Цепочка из последовательно включенных переключателя S с установленным временем срабатывания 6 с и резистора Rn имитирует нагрузку для выходного вала, которая подключалась через 6 с после пуска моделирования. Отметим, что для всех трех схем включения электродвигателя такая скачкообразная нагрузка по крутящему моменту к каким-либо изменениям в передаточной характеристике не приводила при уменьшении сопротивления Rn вплоть до десятых долей ома. Это позволяет сделать вывод о том, что модель обладает неограниченно большим крутящим моментом и угловая скорость ее выходного вала, имитируемая напряжением Uo, не зависит от нагрузки. Теперь перейдем к рассмотрению особенностей каждой схемы включения.

Как видно из схемы на рис. 14.41, а, обмотка возбуждения и якорная цепь включены параллельно, что и послужило поводом к ее названию. Передаточная характеристика такой схемы включения обладает существенной нелинейностью (см. рис. 14.41, б) с заметной зоной нечувствительности.
При последовательной схеме возбуждения обмотка возбуждения и якорь включаются последовательно и для такого включения входное напряжение Ui (напряжение питания) пришлось, естественно, увеличить. Из рис. 14.42, б видно, что передаточная характеристика по виду аналогична предыдущей и также обладает существенной нелинейностью с еще более заметной зоной нечувствительности.
Схема с независимым возбуждением отличается использованием отдельного (независимого) источника питания Uw обмотки возбуждения, что позволяет, как видно из рис. 14.43, б, получить практически линейную передаточную характеристику за исключением незначительного начального участка. Это обстоятельство позволяет сделать вывод, что основной причиной существенной нелинейности передаточных характеристик в двух предыдущих случаях являлось питание обмотки возбуждения от одного источника с якорной цепью, т.е. изменение магнитного потока возбуждения при изменении испытательного напряжения в процессе измерения характеристик.
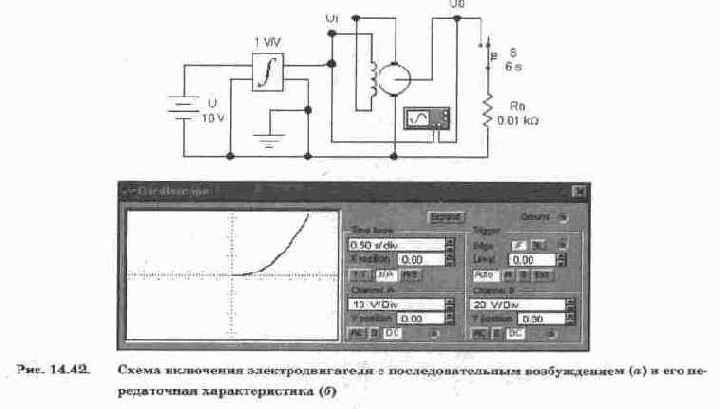

Отмеченный выше факт независимости выходного напряжения Uo (угловой частоты выходного вала) от нагрузки рассматриваемой модели свидетельствует о том, что она работает в так называемом идеальном режиме холостого хода. В таком режиме для схемы с независимым возбуждением передаточная характеристика опи-

сывается простым аналитическим выражением (с учетом принятых обозначений) [63]: Uo=Ui/Kэ где Кэ=(рN/2ла)Ф; р, N — число полюсов и число витков обмотки возбуждения; 2а — число параллельных ветвей обмотки, не участвующих в формировании магнитного потока Ф.
Таким образом, коэффициент К, является чисто конструктивным параметром электродвигателя. Для передаточной характеристики на рис. 14.43, б он равен примерно 12. Для параллельного и последовательного включения электродвигателей постоянного тока аналитических выражений для передаточной характеристики не существует, для их построения используются экспериментальные методы [63].
Функциональный преобразователь на управляемом источнике (схема на рис. 14.44) содержит собственно источник напряжения, управляемый напряжением (ИНУН) 2 и источник испытательного напряжения на интеграторе 1 с источником постоянного напряжения U на входе.
Значения параметров ИНУН задаются с помощью двух диалоговых окон-закладок на рис. 14.45. Параметр N задает количество точек кусочно-линейного выходного сигнала с координатами в единицах напряжения входного XI...Х5 и выходного Y1...Y5 напряжения. Параметром ISD определяется нелинейность в точках излома кривой.

При значениях параметров, указанных на рис. 14.45, и при пилообразном входном сигнале Ui (с начальным значением -3 В) результаты моделирования показаны на рис. 14.46, а, откуда видно, что выходное напряжение изменяется в соответствии с заданными значениями параметров на рис. 14.45. Особенностью преобразователя является то, что его выходное напряжение за пределами заданных значений ((XI,Y1) и (X5,Y5)) повторяет закон его изменения на предыдущем отрезке. Для случая ISD=50% осциллограммы сигналов показаны на рис. 14.46, б.
Контрольный вопросы и задания
1. Составьте эквивалентную схему на ОУ масштабирующего блока с коэффициентом усиления К=2 и VIOFF-VOOFF=O (см. гл. 10)
2. Каким образом в эквивалентной схеме по п. 1 можно ввести постоянную составляющую по входу и выходу?
3. Составьте эквивалентную схему на ОУ трехвходового суммирующего блока с коэффициентами усиления КА=0,5, КВ=2 и КС=1 при нулевых значениях постоянных составляющих.
4. Напишите выражения для выходного напряжения интегрирующего и дифференцирующего блоков в виде Uo(t). Для интегрирующего блока определите допустимое время интегрирования при указанных на рис. 14.29, б значениях параметров VL, VU и VS.
5. Выберите значения параметров схемы на рис. 14.33, а таким образом, чтобы получить смещенную по оси Х на 2 В релейную характеристику
6. Выберите значения параметров схемы на рис. 14.35, а таким образом, чтобы передаточная характеристика имела минимальный наклон к оси X.
7. Проведите испытания схемы делительного устройства на рис. 14.38, а для случая деления двух синусоидальных сигналов одинаковой частоты, но разной амплитуды или фазы.
8. Приведите пример использования схемы на рис. 14.40, а для воспроизведения элементов электропривода или исполнительных органов релейного типа в режиме реверса.
9. С помощью схемы на рис. 14.47 определите сопротивление якорной цепи модели электродвигателя.

10. С помощью схемы на рис. 14.47 получите зависимости Uo=f(Ui) и K,=Uo/Ui=f(Ui) при Ra=0 и указанном на схеме значении Uw. Зависимость Uo=f(Ui) сравните с передаточной характеристикой на рис. 14.43, б.
11. Используя схему включения формирователя передаточных характеристик на рис. 14.32, а и выражение (14.26), проведите исследование приведенных ниже звеньев с указанными для каждого из них коэффициентами передачи К(р). Для каждой приведенной схемы получите АЧХ и ФЧХ, подключив к ним функциональный генератор и измеритель АЧХ-ФЧХ, и сравните результаты с данными, полученными с использованием формирователя передаточных характеристик при одинаковых исходных данных: W=62800 рад/с, С1=С2, R2=0,5R1, W-R1.C1=1.
11.1. Форсирующее (ускоряющее) звено (рис. 14.48, a); K(p)=(R2/Rl)(Rl-Cl-p+l).
11.2. Комбинированное звено 1 из последовательно соединенных интегрирующего и форсирующего звеньев (рис.14.48, б); K(p)=(R2-C2-p+)/p-Rl-C2.
11.3. Комбинированное звено 2 из последовательно соединенных дифференцирующего и инерционного звеньев (рис. 14.48, в); K(p)=p-R2-Cl/(Rl-Cl-p+l).
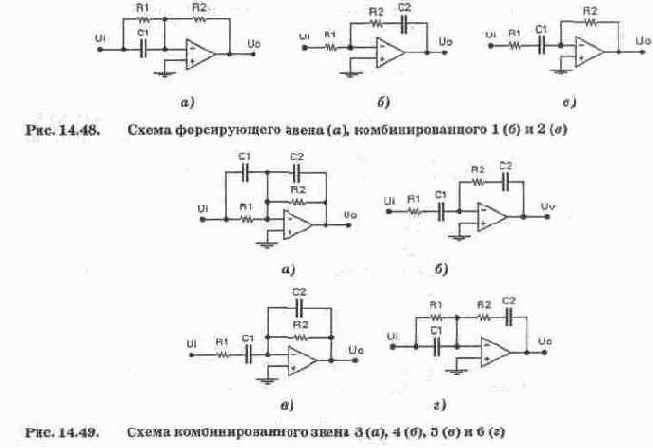
11.4. Комбинированное звено 3 из последовательно соединенных форсирующего и инерционного звеньев (рис. 14.49, a); K(p)=R2(Rl-Cl-p+l)/Rl(R2-C2-p+l).
11.5. Комбинированное звено 4 из последовательно соединенных форсирующего и инерционного звеньев (рис. 14.49, б); K(p)-Cl(R2-C2.p+l)/C2(Rl-Cl.p+l).
11.6. Комбинированное звено 5 из последовательно соединенных дифференцирующего и двух инерционных звеньев (рис. 14.49, в); K(p)=p-R2-Cl/(R2-C2-p+l)(Rl-Cl-p+l).
11.7. Комбинированное звено 6 из последовательно соединенных интегрирующего и двух форсирующих звеньев (рис. 14.49, г); K(p)=(R2-C2.p+l)(Rl-Cl-p+l)/ pRl-C2.
12. Провести моделирование преобразователя на рис. 14.44, изменив знаки в значениях его координат ((X1.Y1) и (X5.Y5)).
Элементы устройств автоматики
При разработке автоматических систем управления достаточно широко используются методы физического или математического моделирования. При физическом моделировании исследования проводятся на модели, физически однородной с объектом — оригиналом — и отличающейся от него в некоторых случаях только количественно. Физическое моделирование применяется, например, при исследовании поведения самолета в воздухе путем продувки его модели в аэродинамической трубе. При математическом моделировании исследования проводятся на модели, которая описывается такими же уравнениями, что и моделируемое устройство.
При создании математических моделей используются цифровые или аналоговые вычислительные устройства. Исторически первыми для этих целей использовались аналоговые устройства [29,61], достоинством которых по сравнению с цифровыми является простота модели и самого процесса моделирования, а также наглядность результатов при непрерывном воспроизведении заданной математической зависимости. Как показано ниже, EWB позволяет проводить моделирование различных устройств автоматики с сохранением наглядности и простоты аналоговых моделирующих устройств.
14.1. Модели для решения дифференциальных уравнений
14.2. Универсальные функциональные преобразователи
14.3. Специализированные функциональные преобразователи
14.4. Примеры использования моделей с релейными характеристиками
14.5. Элементы автоматики в программе EWB 5.0
14.6. Структурное моделирование
Меню File
Меню File предназначено для работы с файлами и вывода информации о разрабатываемой печатной плате на периферийные устройства. Оно содержит следующие команды.
Команды New (Ctrl+ N), Open (Ctrl+0), Save (Ctrl+S), Close, Save As... являются типичными для системы Windows. Для первых трех команд на линейке инструментов предусмотрены стандартные кнопки с подсветкой;
Print... (Ctrl+P) — вывод изображения платы на периферийное устройство;
Drill... — создание управляющего файла для сверлильного станка;
Import, Export — импорт/экспорт библиотечных файлов компонентов, списков соединений и др.
Меню View
Меню View предназначено для управления элементами рабочего окна программы и масштабирования изображения. Меню содержит следующие команды.
Standard — включение/выключение на линейке инструментов первых 12 кнопок;
Interface — включение/выключение на линейке инструментов кнопок

Birdseye — включение/выключение окна-видоискателя Birdseye;
Trace — включение/выключение меню Trace;
Status Bar — включение/выключение строки состояния;
Zoom Full (F7) — отмена операций масштабирования с использованием двух приведенных ниже команд;
Zoom In (F8) — увеличение изображения рабочего поля;
Zoom Out (F9) — уменьшение изображения рабочего поля;
Redraw screen — перечерчивание экрана.
TOP (T), BOTTOM (В) — включение/выключение вывода на экран верхней и нижней стороны печатной платы.
Меню Traces
Меню Traces предназначено для подготовки и редактирования проводников и других элементов печатной платы. Меню содержит следующие команды. New — включение режима ручной трассировки (прокладки) проводников со значениями параметров, установленных в блок-меню Trace; дублируется кнопкой

О крестообразный курсор мыши располагается в предполагаемое начало проводника;
О нажимается и отпускается левая кнопка мыши;
О протягивается проводник нужной длины по горизонтали, вертикали или по диагонали (по диагонали — при выборе в блок-меню режима 45+90);
О при необходимости изменения направления проводника нажимается и отпускается левая кнопка мыши, после чего прокладку проводника можно продолжить под любым углом, если в блок-меню доступен режим all angles;
О окончание прокладки проводника заканчивается нажатием левой, а затем правой кнопок мыши;
О если к имеющемуся проводнику необходимо подсоединить дополнительный проводник, то к первому проводнику в нужном месте подводят крестообразный курсор, нажимают левую кнопку мыши, после чего можно прокладывать второй проводник описанным выше образом.
Move — перемещение проводника; команда дублируется кнопкой

О крестообразный курсор мыши подводится и совмещается с перемещаемым проводником;
О нажимается и отпускается левая кнопка мыши, после чего вертикальный проводник может быть перемещен в горизонтальном направлении, вертикальный — в горизонтальном, наклонный — в вертикальном и горизонтальном направлениях;
О после перемещения проводника нажимается левая кнопка мыши; операция завершается нажатием правой кнопки мыши.
Delete — стирание (удаление) проводника: крестообразный курсор мыши подводится и совмещается с любой точкой стираемого проводника, после чего два раза нажимается левая кнопка мыши; операция завершается нажатием правой кнопки мыши.
Change... — изменение значения параметров проводника; в диалоговом окне команды на рис. 15.2, а можно выбрать все соединения (All nets) или номер отдельного соединения из списка, который выводится после нажатия кнопки в поле Netname. После выбора номера соединения и нажатия кнопки Select» вызывается диалоговое окно (рис. 15.2, б), в котором можно изменить значения параметров проводника данного соединения, в том числе его атрибуты (перемещаемый или неперемещаемый) и расстояние (зазор) с1г до других проводников.
Modify... — расширенный вариант предыдущей команды; в диалоговом окне команды на рис. 15.3, а можно выбрать номер соединения из списка (By net) или непосредственно из изображения печатной платы после нажатия кнопки

From screen», а также номер слоя (Trace layers) и другие параметры. После нажатия кнопки Change layers вызывается диалоговое окно (рис. 15.3, б), в котором выбирается один из 30 внутренних слоев.
Continue — продолжение прерванной команды;
Arc — прокладка проводников в виде дуг; выполняется следующим образом:
О крестообразный курсор мыши ставится в центр предполагаемой дуги и нажимается левая кнопка мыши;
О протягивается окружность в нужном направлении и два раза нажимается левая кнопка мыши; операция заканчивается нажатием ее правой кнопки.
Polygon — создание полигонов — металлизированных участков платы; команда выполняется в пять этапов:
New...— создание полигона — в диалоговом окне (рис. 15.4) указывается имя цепи (Netname, кнопка Select net>>), которая подключена к полигону (обычно это общая шина или шина питания), размеры линий штриховки полигона и зазор между ними (Tracecode), минимальный зазор между полигоном и другими проводниками (Min. Clearance), характер штриховки полигона (Fill pattern), расстояние между проводниками внутри полигона (Fill distance), а также с учетом контактных площадок (Thermal reliefs) различной конфигурации. После внесения необходимых изменений и нажатия кнопки Place вручную наносится контур полигона в следующей последовательности:
О поставить в нужное место (например, на выбранный в окне соединительный проводник) крестообразный курсор мыши и нажать ее левую кнопку, в результате чего на рабочем поле возникает маленький кружок (начало полигона);
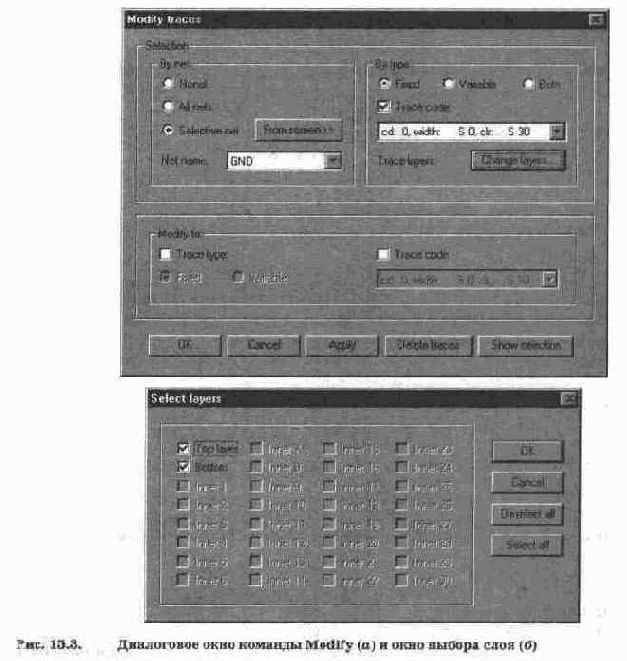
О используя опыт выполнения команды New, нанести замкнутый контур полигона требуемого размера, закончив его построение на начальном кружке, после чего нажать левую кнопку мыши;
О в меню на рис. 15.5, а подтвердить согласие установить полигон в выбранном месте;
О в повторно появившемся окне на рис. 15.4 нажать клавишу Place, в результате чего получаем изображение полигона типа показанного на рис. 15.5, б (цвет фона рабочего поля изменен на светло зеленый).
Delete — стирание (удаление) полигона, после выбора команды необходимо щелкнуть по удаляемому полигону и подтвердить удаление в меню, аналогичном рис. 15.5, а.
Change... — внесение изменений в имеющийся полигон; после выбора команды необходимо щелчком мыши по изображению полигона вызвать окно, аналогичное показанному на рис. 15.4, куда и вносятся необходимые изменения.
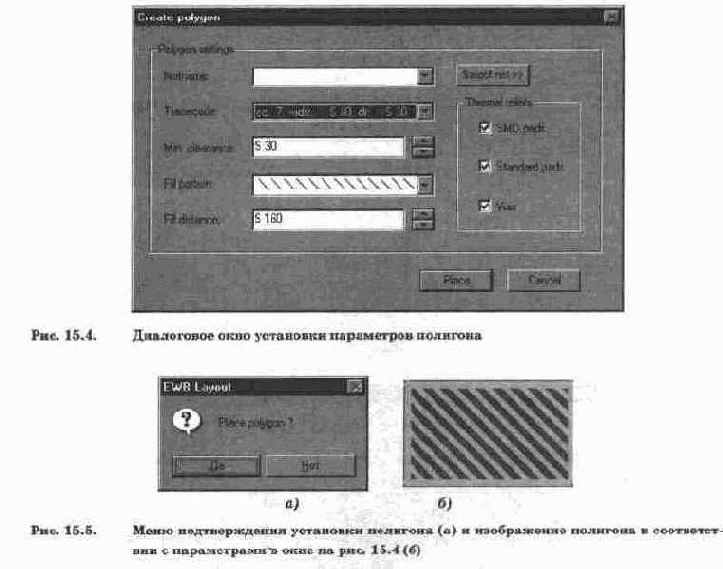
Update All, Update Single — автоматическое исправление изображения всех или одного (по выбору) полигона. Layers... — выбор цвета всех графических элементов, включая элементы рабочего окна; команда дублируется кнопкой

на линейке инструментов и сопровождается вызовом окна общих настроек в режиме закладки Colors (рис. 15.6). С его помощью устанавливается цвет следующих объектов:
верхней (ТОР) и нижней (BOTTOM) стороны платы, а также каждого из 30 внутренних (Inner)слоев;
изображений надписей, компонентов и др. на верхней (silk TOP) и нижней (silk BOTTOM) стороне платы;
подключенных (connected) и не подключенных (unconnected) контактных площадок (pads), межслойных соединений (Vias) и отверстий (Drill);
вспомогательных линий, возникающих при перемещении компонентов (см. рис. 15.10): булавок-указателей (Force-vectors), маркеров (Marked), контурных линий-призраков (Ghost color);
вспомогательных линий с взаимным контролем выбора цвета: обозначенных пунктиром контактных площадок (Pad highlight), сервисных линий (Service lines), гистограмм (Histograms) и др.
Layer push — вставка проводника в текущий (активный) слой (по умолчанию — верхняя сторона платы); после выбора команды щелчком мыши указать помещаемый в слой заранее подготовленный проводник, после чего ему присваивается атрибут неперемещаемого (fixed).

Highlight net... — выделение пунктиром проводника одного из соединений платы;
выбирается из списка соединений для данной платы в меню на рис. 15.9 (команда удобна при визуальном контроле трассировки).
Set active layers... — установка активного слоя для трассировки (выводится на передний план); выбирается с помощью меню на рис. 15.8
Delete Open trace ends — стирание не подключенных проводников.
Delete Single net, Delete All traces. Delete unused via's. Delete single Via — удаление отдельных проводников, всех проводников, неиспользуемых отверстий, отдельных отверстий соответственно; при выполнении команд необходимо указать удаляемый элемент курсором мыши или с помощью меню, аналогичных рис. 15.8.

Меню Components
Меню Components предназначено для выбора, перемещения и удаления компонентов на проектируемой плате. Оно содержит следующие команды.
New... — выбор компонента; команда дублируется кнопкой

Refdes — позиционное обозначение;
Value — номинальное значение параметра компонента;
Rotation — положение компонента (0, 90, 180 или 270°) на заданном слое (по умолчанию — на верхней стороне платы);
Shape — выбор из списка корпусов компонентов текущей платы, если установлена опция Local в блоке Shape source (в данном случае платы для генератора Колпитца);
Position — позиция на печатной плате, куда будет загружен выбранный корпус компонента (в данном случае — в начальную точку платы);
Library — выбор корпуса из библиотеки корпусов (см. рис. 15.9);
Design file — выбор корпуса из каталога готовых печатных плат layout\pcbs (файлы с расширением .ddf).
После выбора корпуса компонента можно просмотреть его изображение, нажав кнопку Show.
Move — перемещение компонента; команда дублируется кнопкой

О после выбора команды помещаем курсор мыши на перемещаемый компонент, нажимаем и отпускаем левую кнопку мыши; после нажатия кнопки сразу возникают проводники-указатели, показывающие связь выводов компонента с выводами других компонентов схемы (см. рис. 15.10, а, на котором видны также лучи крестообразного курсора и верхняя граница заготовки платы в виде горизонтальной линии под изображениями компонентов);
О перемещаем компонент на заготовку и вторично нажимаем и отпускаем левую кнопку мыши, в результате чего меняется цвет перемещаемого компонента (линии-призраки) и появляются уточненные проводники-указатели связи и указатели-булавки от выводов компонентов, которые имеют непосредственную или косвенную (через другие компоненты) связь с перемещаемым (рис. 15.10, б);
О третий этап завершается нажатием правой кнопки мыши, после которого остаются только указатели-булавки (рис. 15.10, в).
Delete — удаление компонента с рабочего поля; после выбора команды курсор мыши подводится к удаляемому компоненту и нажимается левая кнопка, после чего в появившемся меню подтверждается удаление.
Change — изменение параметров компонента; после выбора команды необходимо курсором мыши указать компонент и нажать левую кнопку, после чего появляется диалоговое окно на рис. 15.11, аналогичное показанному на рис. 15.9 и отличающееся тем, что в нем можно изменить ширину компонента (width), его высоту или длину (height) и толщину контурной линии (thickness), а также положение позиционного обозначения кнопкой Text position»; после ее нажатия необходимо курсором мыши указать новое местоположение и нажать два раза левую, а затем один раз правую кнопку мыши.
Attributes... — задание атрибутов компонента; в диалоговом окне (рис. 15.12) задается ключевое слово Keyword для выбранного компонента в списке Component для текущей платы с комментарием в строке String. После нажатия кнопки Select>> необходимо мышью выбрать изображение компонента (в данном случае транзистора QO), нажать левую кнопку мыши и в повторно появившемся окне (рис. 15.12) подтвердить выбор.
Text position — перемещение позиционного обозначения компонента на печатной плате; выполняется в порядке, аналогичном выполнению команды Text position>> на рис. 15.11.
Drag — команда выполняется аналогично команде Move (перемещение компонентов).
Glue/Unglue — изменение цвета контура компонента с красного на серый и наоборот; после выбора команды курсором мыши выбирается компонент, после чего нажимается левая кнопка, а затем правая (завершение команды).

Block move — перемещение отмеченного блока из нескольких компонентов; после выбора команды курсор мыши устанавливается в левый верхний угол предполагаемого блока, после чего нажимается и отпускается левая кнопка мыши и по правилу прямоугольника (см. гл. 1) производится выделение подлежащих к перемещению компонентов; выделение подтверждается вторичным нажатием левой кнопки, после чего выделенный блок перемещается в нужное место,

перемещение подтверждается третьим нажатием левой кнопки. Команда завершается нажатием правой кнопки мыши.
Block glue. Block unglue — изменение цвета контура выделенных компонентов, команды выполняются аналогично предыдущей, но их выполнение заканчивается вторичным нажатием левой кнопки мыши.
Search... — поиск на рабочем поле, включая и заготовку печатной платы, компонента по его позиционному обозначению на загруженной для трассировки схеме (выбирается из предлагаемого списка); после завершения поиска компонент окрашивается в желтый цвет (цвет выбирается в строке Marced на рис. 15.6).
List — вывод списка компонентов загруженной для трассировки схемы с указанием их позиционных обозначений и значений параметров (см. рис. 15.13).

Меню Texts
Меню Texts предназначено для создания, перемещения, редактирования и удаления текстовых надписей на проектируемой плате. Оно содержит следующие команды.
New... — создание текста на плате; команда дублируется кнопкой

О курсор мыши с прямоугольным контуром созданного текста поместить на нужное место и нажать левую кнопку;
О в повторно появившемся окне на рис. 15.14 подтвердить выбор нажатием кнопки ОК;
О завершить команду нажатием правой кнопки мыши.
Move — перемещение текста; команда дублируется кнопкой


О курсором мыши выбирается подлежащая перемещению надпись и нажимается левая кнопка;
О производится перемещение прямоугольного контура надписи и вторично нажимается левая кнопка мыши;
О команда завершается нажатием правой кнопки мыши.
Delete — удаление текста; после выбора команды поместить курсор мыши на удаляемый текст и нажать левую кнопку, после чего в появившемся меню подтвердить удаление.
Change — изменение текста; после выбора команды поместить курсор мыши на изменяемый текст и нажать левую кнопку, после чего в появившемся окне (рис. 15.14) сделать необходимые изменения и нажать кнопку ОК.
Меню Shapes
Меню Shapes предназначено для редактирования, удаления и копирования корпусов компонентов. Меню содержит следующие команды.
Edit — редактирование корпусов компонентов; после выбора команды курсором мыши выбирается подлежащий редактированию компонент и нажимается левая кнопка. В качестве примера выберем транзистор на рис. 15.1. При таком выборе после нажатия левой клавиши мыши вызывается окно редактора (рис. 15.16) с изображением на его рабочем поле корпуса транзистора, используемого в генераторе Колпитца. Окно редактора по структуре аналогично окну на рис. 15.1. Основное отличие заключается в другом содержании поле меню и линейки инструментов.

Рассмотрим содержимое меню редактора.
Меню File содержит команды Exit — выход из редактора и Preferences... — предварительные данные общего характера; в диалоговом окне команды на рис. 15.17 можно установить:
О единицы измерения (Unit): мил (Standard (1/1200")) — в английской системе, равен 1/1200 дюйма; Inches (") — в дюймах; Metric (mm) — в метрической системе, в миллиметрах;
О размер сетки (Grid size) и видимой сетки (Visual grid) (при устанавливаемом по умолчанию черном фоне рабочего поля редактора видны белые точки узлов сетки);
О размеры контактных площадок Pad code (диаметр площадки S72 и диаметр отверстия S42) с указанием статуса их отображения (Pad layers) на верхней и нижней стороне платы.
При нажатии кнопки Set origin>> необходимо курсором мыши выбрать элемент конструкции (см. рис. 15.16), для которого целесообразно установить индивидуальные размеры, и нажать левую кнопку, после чего во вторично появившемся окне на рис. 15.17 внести необходимые изменения и нажать кнопку ОК.

В меню View команды Standard, Birdseye, Status Bar, Zoom Full (F7), Zoom In (F8), Zoom Out (F9), Redraw screen аналогичны одноименным командам меню View основного окна программы (рис. 15.1). Команда Zoom Window используется для увеличения масштаба изображения окна редактора, если оно находится в не полностью развернутом виде. При выборе команды Info object необходимо на рис. 15.17 курсором мыши выбрать элемент конструкции, для которого требуется получить сведения по его графическому выполнению, и нажать левую кнопку. В качестве примера на рис. 15.18 показан результат выполнения команды при выборе в качестве элемента конструкции наружного ободка корпуса транзистора на рис. 15.16. На рис. 15.18 приведены координаты центра окружности ободка (Center point), радиус дуги (Radius) со значениями охватываемых ею углов (Start angle. Included angle).
Меню Edit содержит следующие команды:
Move — перемещение элементов конструкции и надписей; команда дублируется кнопкой

Delete — удаление элемента конструкции или надписи; команда дублируется кнопкой

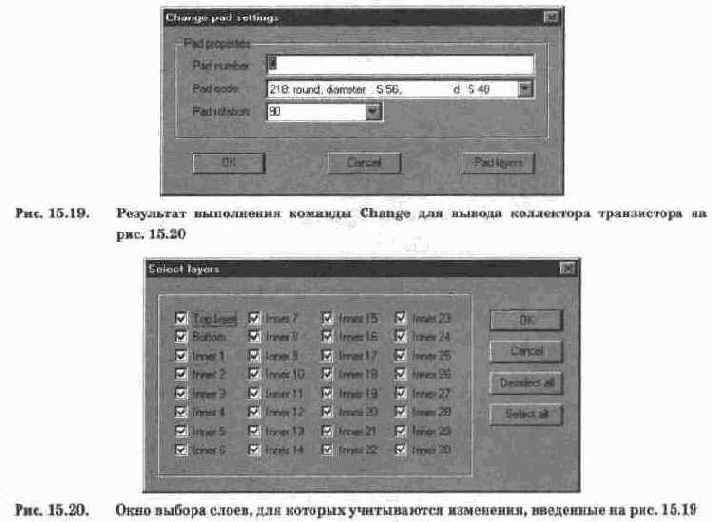
Change — изменение элемента конструкции или надписи; команда дублируется кнопкой

Меню Place редактора содержит следующие команды.
Line, Arc — рисование линий и дуг; команды дублируются кнопками

Pads... — выбор параметров контактной площадки вывода компонента; команда дублируется кнопкой

(рис. 15.21) задаются значения следующих параметров:
Pad code. Pad number — размеры площадки и общее количество площадок, включая однотипные (Upto);
X-pitch, Y-pitch — координаты вывода (за начало координат на рис. 15.16 принимаются координаты вывода эмиттера Е);
Pad step — порядок нумерации четных и нечетных выводов;
Rotation — угловое положение вывода (только для контактных площадок прямоугольной формы);
X-position, Y-position — координаты вывода, используемые при выключенной сетке размещения контактных площадок.

Attributes... — задание атрибутов элементов конструкции; в диалоговом окне команды на рис. 15.22 задается ключевое слово Keyword элемента конструкции и значения его параметров, например, координаты, размеры и т.п. Переход к редактированию атрибута следующего элемента производится после нажатия кнопки Add.
Copy — копирование корпуса компонента; в диалоговом окне команды на рис. 15.23 можно выбрать для копирования корпус на текущей плате (Local), из библиотеки корпусов (Library), из другой печатной платы (Design file) и с экрана после нажатия кнопки From screen>>. Копируемому корпусу можно присвоить новое имя (New shape name) и просмотреть его конструкцию после нажатия кнопки Show.
Delete — удаление корпуса; после выбора команды необходимо указать имя удаляемого корпуса в поле строки, размещаемой на уровне линейки инструментов в правом верхнем углу экрана.
List — команда вызова списка корпусов текущей платы; окно команды является упрощенным вариантом окна на рис. 15.23.

Меню Netlist
Меню Netlist предназначено для загрузки, создания и редактирования, удаления и копирования корпусов компонентов. Меню содержит следующие команды.
Load... — загрузка файла соединений.
Create... — создание новых соединений в загруженном файле; в диалоговом окне команды на рис. 15.24 в строке Net name указывается имя соединения, в строке
Trace code — ширина его проводника и минимальное расстояние до других проводников (clearance). В создаваемом соединении можно сделать дополнительный вывод (например, для контрольной точки) после нажатия кнопки Add pins» или перейти к созданию следующего нового соединения после нажатия кнопки Create next.
Edit... — редактирование соединений; для рассмотрения команды целесообразно представить схему генератора Колпитца в виде, показанном на рис. 15.25, которая отличается от рис. 1.23 отсутствием осциллографа (он в данном случае не нужен) и обозначением номеров соединений, которые ей присваивает EWB Layout при автоматической трансляции из EWB. Общей шине присваивается имя GND, другим соединениям присваивается трехзначный номер с буквой N в начале (выполняется автоматически). Рассматриваемая команда сопровождается диалоговым окном на рис. 15.26, в котором в качестве примера приведено содержимое соединения N003, выбранное в строке Select net. Из рис. 15.24 и 15.25 видно, что содержимое соединения N003 одинаково на обоих рисунках. Отметим, что в столбце Pin number указывается номер вывода компонента. Редактируемое соединение можно также вызвать с экрана с помощью кнопки From screen», добавить или удалить вывод кнопками Add pins и Delete pins.
Properties... — выбор размеров проводника соединения; в диалоговом окне команды на рис. 15.27 в строке Available nets выбирается номер соединения и в строке Tracecode задаются ширина проводника и величина допустимого зазора. Соединение можно также выбрать на экране после нажатия кнопки Select net», и про должить работу после нажатия кнопки Apply (применить). Введенные данные сохраняются и используются в дальнейшем при проведении автотрассировки.
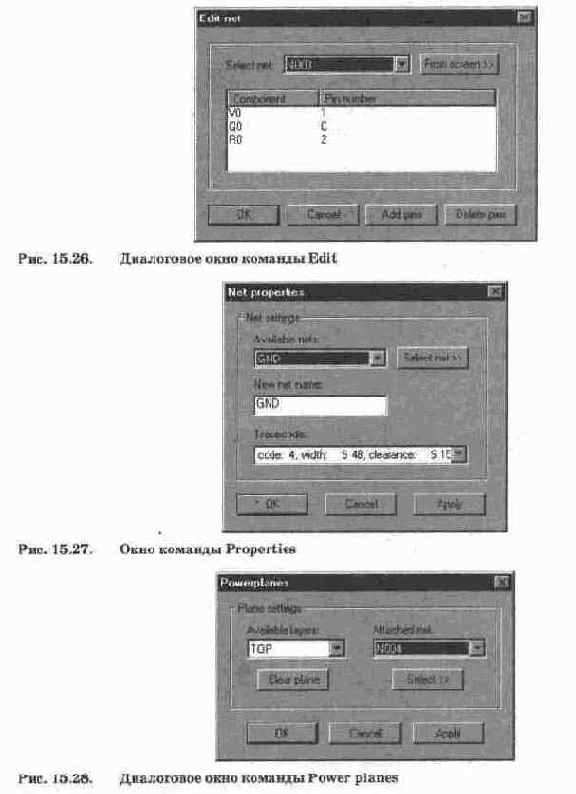
Power planes... — выбор слоя для размещения заданного проводника; в диалоговом окне на рис. 15.28 на выбранном в строке Available layers слое размещается заданный в строке Attached net номер цепи, подсоединяемой к этому слою.
Lists... — вывод списка соединений.
Compare netlist... — сравнение двух файлов списков соединений; результатом выполнения команды является сообщение об идентичности или неидентичности сравниваемых списков.
Меню Tools
Меню Tools предназначено для создания и редактирования печатных плат. Оно содержит следующие команды.
Autoroute — выбор режима трассировки (разводки) платы; команда состоит из следующих пунктов.
Options... — выбор метода трассировки (рис. 15.29); по умолчанию выбран ортогональный (Orthogonal) метод, при котором направление проводников (Layer Direction) на противоположных сторонах платы (или на каждом из 30 внутренних слоев) выбирается (на закладке Layer Direction) во взаимно перпендикулярных направлениях, т.е., если на верхней стороне выбирается горизонтальное (Horizontal) расположение проводников, то на нижней стороне — вертикальное (Vertical). Возможен также выбор расположения проводников под углом 45°; в программе это обозначается как северо-восточное (North East) направление на одной стороне платы и юго-восточное (South East) — на другой. Второй метод — трассировка с использованием всех направлений (All Direction), третий — с учетом межслойных соединений (Via reduction). Предусмотрен режим запрета межслойных соединений при трассировке (No vias), и уменьшения их количества после трассировки (Reduce after initial) или автоматического сдвига (Allow Shift) на задаваемую опцией Hugging величину в 1/40 дюйма. В диалоговом окне на рис. 15.29 можно задать также режим очередности прокладки проводников Wire Sort — короткие соединения в первую очередь (Short connections first) или длинные (Long connections first), и время автосохранения результатов трассировки (Backup time) в минутах.

Internal — подкоманда трассировки текущей платы; она содержит еще несколько подкоманд. Для их рассмотрения целесообразно воспользоваться практическим примером. Для этого компоненты генератора Колпитца на рис. 15.1 перенесем на заготовку печатной платы (см. рис. 15.10) и разместим их в порядке, совпадающем с их положением на схеме рис. 15.25 и показанном на рис. 15.30. После такой подготовки можно перейти к рассмотрению первой подкоманды.


Рис. 15.31. Печатная плата генератора Колпитца
Internal/Route All — автоматическая трассировка всей печатной платы; конечный результат выполнения команды показан на рис. 15.31. Однако при первом использовании команды результат может существенно отличаться от показанного на рис. 15.31, что объясняется неудачным расположением компонентов. Связано это с нумерацией их выводов и их привязкой к определенному номеру соединения (см. рис. 15.26). В то же время номера выводов при размещении компонентов не индицируются, что и приводит к неудачной трассировке. Для устранения этой неувязки можно изменить для каждого соединения номер вывода компонента (см. рис. 15.26) или, что значительно проще, повернуть неудачно размещенный компонент, воспользовавшись командой Components>Change (см. рис. 15.11). После внесения изменений необходимо повторно выполнить подкоманду Internal/Route All. Для перемещения позиционных обозначений компонентов используется команда Components>Text position, для ввода названия платы — команда Texts>New.
Другие подкоманды из блока Autoroute>Internal являются частными случаями рассмотренной; наиболее важные из них перечислены ниже.
Internal/Route Net — трассировка отдельного соединения, выбранного из списка на рис.15.32.
Internal/Route Component — трассировка соединения, к которому подключен указанный курсором мыши компонент;
Internal/Route Bus — разводка только тех выводов компонентов, которые имеют одинаковые координаты; применяется для предварительной трассировки микросхем памяти или других однородных структур [2]. Autoroute>External — трассировка плат по данным, загруженным с помощью транслятора GXR (данные по транслятору в справочной системе отсутствуют); команда имеет две подкоманды, которые вызываются также кнопками


Connectivity check... — проверка соединений платы (Entire Board); в диалоговом окне команды на рис. 15.33 проверяемое соединение выбирается из списка или непосредственно на плате кнопкой Select». Команда заканчивается сообщением о наличии или отсутствии соединения; результаты проверки фиксируются в файле с расширением.con.
Design rule check... — проверка соблюдения технологических правил трассировки платы (наличие электрических соединений, правильная установка ширины проводников и зазоров между объектами); команда сопровождается окном, аналогичным показанному на рис. 15.33.
Resize component text... — изменение параметров текста (типа надписи GENERATOR на рис. 15.31); в диалоговом окне команды на рис. 15.34 можно изменить высоту, ширину и толщину линий символов текста.
Renumber components... — перемещение позиционного обозначения компонентов на плате; в диалоговом окне команды на рис. 15.35 для указанного в строке Components mask компонента (по умолчанию — для всех) можно задать в строке Direction ориентацию его позиционного обозначения, а в строке Start corner — сверху слева (Upper Left), снизу слева (Lower Left), сверху справа (Upper Right) или снизу справа (Lower Right) от компонента. При этом на дисплее Preview демонстрируется результат выполнения команды.

Pin & Gate swap... — перестановка логически эквивалентных выводов и секций компонентов платы; в диалоговом окне команды на рис. 15.36 можно задать необходимый объем перестановок (Swap level) внутренних Pins (например, для контрольных точек) и внешних выводов External Gates (например, на разъем) с заданным шагом (iterations) в ручном (Manual) или автоматическом (Automatic) режиме.
Pad stack... — редактирование межслойных соединений и контактных площадок; в диалоговом окне команды на рис. 15.37 указывается объем выполняемых работ выбором для редактирования контактных площадок Pads и (или) межслойных соединений Vias непосредственно на изображении печатной платы после нажатия кнопки From screen>>, исключая (Disable) или включая (Enable) верхний (top), нижний (bottom) или внутренние слои (inner) платы.
Layer push — вставка нового слоя печатной платы.

Chamfer corners... — сглаживание прямоугольных изгибов проводников; в диалоговом окне команды на рис. 15.38 в строке Chamfer grid задается расстояние от угла прямоугольного проводника, на котором производится сглаживание прямоугольных изгибов (замена катетов гипотенузой); команда выполняется автоматически для всех проводников платы.
Board outline — доработка печатной платы путем вызова редактора (Edit), включение в состав платы полигонов (Define by polygon), определение границ платы (Define by rectangle). После выбора последней подкоманды курсор мыши помещается в левый верхний угол нового прямоугольника, нажимается левая кнопка и выделяется новый контур платы, в завершении вторично нажимается левая кнопка и подтверждается запрос на удаление старого контура; получаемый при этом контур платы показан на рис. 15.31.
Reference point... — изменение координат опорной точки платы; в окне команды на рис. 15.39 в строках Х и Y устанавливаются новые значения координат опорной точки (левый нижний угол платы); после нажатия клавиши Set by mouse» курсор мыши помещается в выбранную точку и нажимается левая кнопка.
Relative mode (Ctrl+R) — включение/выключение режима абсолютных/относительных координат; во включенном состоянии (индицируется появлением символа R в строке состояния слева от указателя координат) курсор мыши помещается в точку начала отсчета относительных координат и нажимается левая кнопка, в результате чего координаты этой точки становятся нулевыми и, следовательно, координаты других точек будут определяться относительно этой точки, в режиме "выключено" абсолютные координаты отсчитываются относительно опорной точки платы.
Design factor — определение связи между размерами создаваемого графического изображения и единицами измерения.

View nets... — просмотр трассировки выбранных соединений; в диалоговом окне команды на рис. 15.40 в строке Select net кнопками «Previous и Next» или обычным способом из списка выбирается номер соединения платы, которое необходимо просмотреть. После нажатия кнопки ОК проводник выбранного соединения выделяется (подсвечивается) на плате. Так можно просмотреть проводники всех соединений, при необходимости стирая ненужные кнопкой Reset.
Info — вывод на экран информации о печатной плате (Board status): список соединений (Net status) или компонентов печатной платы (Object status). При выборе Object status необходимо щелкнуть курсором мыши по интересующему компоненту. В качестве примера на рис. 15.41 приведены полученные таким образом данные о транзисторе.
Options... — вызывается окно на рис. 15.6 (см. также рис. 15.15) в режиме закладки View Items, в котором приводится перечень технологических ограничений.
Следует заметить, что в рабочей версии программы EWB Layout для автоматической трассировки предполагается использовать также программу SPECCTRA, отличающуюся оригинальным алгоритмом и позволяющую производить трассировку плат повышенной сложности [2].

Настройки общего характера.
Настройки общего характера сосредоточены в окне Options, две закладки которого показаны на рис. 15.8 и 15.19. Рассмотрим кратко содержание других закладок.
Board setting — задание параметров платы: шага сетки для мыши (Mouse grid), погрешности изготовления отверстий (Drill tolerance), способа пайки волной (Wave solder), неровностей поверхности (Oversize value) платы, максимального количества слоев (Мах layers).
System setting — выбор единиц измерения (см. рис. 15.21) и интервала автосохранения данных (Automatic save).
Technology files — выбор каталогов для хранения файлов соединений, контактных площадок и управляющих программ для сверлильных станков.
Trace sizes — задание ширины (Width) проводников и зазоров (Clearance) между ними.
Pad sizes — выбор размеров контактной площадки (диаметры площадки и отверстия) и слоев для ее размещения.
Via sizes — выбор размеров межслойных соединений (диаметры площадки и отверстия) и слоев для ее размещения.
Rule level — выбор режима проверки выполнения графических изображений: полная проверка (Full check), контроль нарушения зазоров и коротких замыканий (Overrule), контроль выключен (Disabled).
Trace & Vias — установка атрибутов проводников: перемещаемый (Variable) или неперемещаемый (Fixed), размеров межслойных соединений (диаметры площадки и отверстия), угла подхода проводника к соединению (ортогональный, диаго нальный, под любым углом, All angle), угол поворота межслойного соединения (Via rotation): 0, 90, 180 или 270°.
Libraries — перечень загруженных библиотек. Files & paths — местоположение каталогов.
Контрольные вопросы и задания
1. Каким образом можно экспортировать схему из EWB в EWB Layout?
2. Какие команды используются для увеличения и уменьшения изображения печатной платы?
3. Опишите процесс прокладки проводников различной конфигурации и ширины. Какие команды при этом используются?
4. Какая разница между проводником и соединением?
5. Какие атрибуты могут быть присвоены проводнику?
6. Каким образом рисуются проводники круглой формы? Нарисуйте горизонтальный проводник с закруглением на одном из его концов.
7. Что такое полигон и как он создается? Нарисуйте полигон Г-образной формы со штриховкой (заполнением) из горизонтальных и вертикальных проводников.
8. С помощью каких команд можно изменить цветовое оформление рабочего поля и его элементов?
9. Какой командой просматривается конфигурация проводников отдельных соединений платы?
10. Каким образом можно получить данные о компоненте платы?
11. Перенесите на заготовку печатной платы компоненты схемы генератора Колпит-ца, экспортированной из EWB, и разместите их в оптимальном, на Ваш взгляд, порядке.
12. Что такое атрибуты компонентов платы и для чего они могут быть использованы?
13. Каким образом можно переместить несколько компонентов сразу?
14. Каким образом на печатной плате создаются надписи? Какие команды используются для их редактирования, перемещения и удаления?
15. В каких диалоговых окнах можно установить единицы измерения?
16. Каким образом можно отредактировать корпус компонента?
17. Какими командами можно просмотреть список соединений платы и отредактировать имена проводников?
18. В каком меню программы находятся команды трассировки плат? Назовите их отличия.
19. Проведите трассировку платы генератора Колпитца (см. п. 11).
20. Проведите трассировку платы по п. 11 поэтапно для каждого компонента.
21. Проведите проверку соединений печатной платы по п. 19.
22. Какой командой можно сгладить проводник с углом поворота 90°?
23. Нарисуйте внешний контур разработанной в п. 19 платы.
24. Каким образом и в каких единицах измеряется расстояние между двумя заданными точками платы?
Библиотечные ЦАП и АЦП
11.5 Библиотечные ЦАП и АЦП
В библиотеке программы EWB 4.1 преобразователи представлены 8-разрядными ЦАП и АЦП.
Схема включения библиотечного ЦАП приведена на рис. 11.8. Она содержит собственно ЦАП (DAС V) два источника опорного напряжения +Uop и -Uop, генератор слова и осциллограф
Выходное напряжение ЦАП определяется выражением [67]:

где D — десятичный эквивалент входного двоичного кода (например, при входном коде 00000011 D=3).
Задавая соответствующие кодовые комбинации на выходе генератора слова, можно с помощью осциллографа. Da измерить максимальное выходное напряжение ЦАП, а также минимальное, соответствующее младшему разряду и определяющему разрешающую способность ЦАП. Нумерация разрядов показана на графическом значке ЦАП, осциллограмма— на рис. 11.9.

Рис. 11.8. Схема включения библиотечного ЦАП

Для ЦАП с опорными источниками тока +Iop, -lop (DAC I — см. разд. 2.7) ток прямого и инверсного выхода определяется соответственно формулами [67]:

Схема включения библиотечного АЦП показана на рис. 11.10. В ее состав входят собственно АЦП (ADC), источники опорного напряжения, генератор слова для синхронизации и управления выходом АЦП, функциональный генератор в качестве источника входного сигнала Ui, логический анализатор, преобразователь двоичный код-код ASCII и осциллограф.
Назначение выводов АЦП: VIN — подключение источника преобразуемого сигнала; VREF+, VREF- — подключение источников опорного напряжения; SOC — вход синхронизации; ОЕ — разрешение на выдачу выходной двоичной комбинации на выходы DO...D7; ЕОС — сигнал готовности данных (например, при выдаче данных на ЭВМ).
Для заданного значения входного напряжения Ui, зафиксированного, например, с помощью устройства выборки и хранения (см. разд. 10.10), десятичный эквивалент двоичного кода на выходе АЦП определяется выражением [67]:


Рис. 11.10. Схема включения библиотечного АЦП

Устройство ASCII позволяет записать данные в текстовый файл. После двойного щелчка по его изображению вызывается диалоговое окно, показанное на рис. 11.11, где указывается имя файла. По умолчанию в меню предлагается имя схемного файла, имеющее расширение.txt.
Полученные данные с АЦП можно анализировать с помощью логического анализатора и осциллографа. Данные на экране логического анализатора при преобразовании синусоидального сигнала с напряжением 1 В и частотой 1 кГц показаны на рис. 11.12.
Начальный участок данных на рис. 11.12 после их преобразования в аналоговый сигнал с помощью ЦАП показан в виде осциллограммы на рис. 11.13.

Контрольные вопросы и задания
1. Используя схему ЦАП на рис. 11.8, установите зависимость выходного напряжения от значения двоичного кода на входе. Определите разрешающую способность ЦАП (цену младшего разряда — МР) и получите формулу для расчета выходного напряжения. Рекомендуется работать с генератором слова в пошаговом режиме (Step).
2. Используется ли ЦАП в составе библиотечного АЦП?
3. Проведите качественный сравнительный анализ осциллограмм на рис. 11.12 и 11.13.
4. Проведите сопоставительный анализ данных на рис. 11.12 и данных, зарегистрированных в текстовом файле.
Биполярные транзисторы
2.6. Биполярные транзисторы
Транзисторы разделяются на типы (подтипы) по классификационным параметрам. Например, маломощные низкочастотные и среднечастотные транзисторы классифицируются по таким параметрам, как коэффициент усиления по току и предельная частота усиления или генерации. В отдельных случаях особо выделяют шумовые свойства транзисторов, характеризуемые коэффициентом шума, или способность транзисторов работать при повышенных напряжениях на коллекторе.
Маломощные высокочастотные транзисторы классифицируются по статическому коэффициенту усиления тока в схеме с общим эмиттером (ОЭ) и модулю коэффициента усиления тока на частоте 10...20 МГц.
Мощные низкочастотные транзисторы классифицируются по максимальному обратному напряжению между коллектором и базой и статическому коэффициенту усиления тока в схеме с ОЭ.
При практическом использовании транзисторов используются следующие параметры.
Параметры постоянного тока используются для расчета режима транзистора по постоянному току. К этим параметрам относятся:
1. Обратный ток коллекторного перехода Iко — ток через переход коллектор—база при отключенном эмиттере и заданном напряжении на коллекторе.
2. Обратный ток эмиттерного перехода Iко — ток через переход эмиттер—база при отключенном коллекторе и заданном напряжении на эмиттере.
3. Начальный ток коллектора Iкн — ток в цепи коллектора при замкнутых эмиттере и базе и заданном напряжении на коллекторе. В некоторых случаях указывается начальный ток коллектора при включении между базой и эмиттером заданного сопротивления.
4. Ток коллектора запертого транзистора Iкз — ток коллектора при обратном смещении эмиттерного перехода и заданных напряжениях на эмиттере и коллекторе.
Параметры малого сигнала характеризуют работу транзисторов в различных усилителях. Переменные токи и напряжения на электродах транзисторов при измерениях этих параметров должны быть малыми по сравнению с постоянными токами и напряжениями, определяющими выбор начальной рабочей точки (начальное смещение). Сигнал считается малым, если при изменении (увеличении) переменного тока (или напряжения) в два раза значение измеряемого параметра остается неизменным в пределах точности измерений. Так как транзисторы имеют резко выраженные нелинейные свойства, параметры малого сигнала сильно зависят от выбора начального смещения. Для характеристики таких параметров чаще всего используется система Н-параметров в следующем составе: входное сопротивление Н11 — отношение напряжения на входе к вызванному им изменению входного тока;
коэффициент обратной связи по напряжению H12 — отношение изменения напряжения на входе к вызвавшему его приращению напряжения на выходе; выходная проводимость Н22 — отношение изменения выходного тока к вызвавшему его изменению выходного напряжения при условии холостого хода по переменному току на входе; коэффициент усиления тока H21 — отношение изменения выходного тока к вызвавшему его приращению входного при условии короткого замыкания выходной цепи. В зависимости от схемы включения к цифровым индексам добавляется буквенный: б — для схемы с ОБ, э — в схеме ОЭ, к — для схемы с ОК.
Применяются и другие символы для обозначения коэффициента усиления по току: для схемы с ОБ — а, а для схемы с ОЭ — В или р. Эти коэффициенты связаны с Н-параметрами следующими соотношениями:

Измерение Н-параметров, как правило, производится на низкой частоте (50... 1000 Гц). Они используются при расчетах низкочастотных усилителей, преимущественно первых каскадов, работающих на малых сигналах. На высокой частоте коэффициенты усиления тока становятся комплексными величинами (так же как и другие Н-параметры). Усилительные свойства транзисторов на высокой частоте характеризуются модулем коэффициента усиления тока ¦а¦, ¦H21б] или ¦В¦. Частота, на которой значение ¦H21бl уменьшается на 3 дБ (около 30%) по сравнению с Наш, измеренным на низкой частоте, называется предельной частотой усиления тока fa.
Модуль усиления тока в схеме ОЭ уменьшается с ростом частоты более заметно, чем в схеме ОБ. В некоторой области частот параметр ¦H21э¦ обратно пропорционален частоте: ¦H21э¦=Fт/F. Частота F, — граничная частота усиления тока базы. На этой частоте модуль ¦Н21э¦ равен 1. Имеет место приближенное соотношение: fа=mFт где т=2 для бездрейфовых и т=1,6 для дрейфовых транзисторов.
К малосигнальным параметрам относятся также емкости переходов транзистора. Емкость коллекторного перехода Ск — емкость, измеренная между коллекторным и базовым выводами транзистора при отключенном эмиттере и обратном смещении на коллекторе. Емкость эмиттерного перехода Сэ — емкость, измеренная между выводами эмиттера и базы при отключенном коллекторе и обратном смещении на эмиттере. Значения емкостей Ск и Сэ зависят от приложенного напряжения. Если, например, указано значение Ск при напряжении U, то емкость Скх при напряжении U, можно найти из приближенной формулы: Скх = Cк(U/Uх)m, где m определяется таким же образом, как и в формуле (4.5).
Максимальная частота генерации Fмакс — наибольшая частота автоколебаний в генераторе на транзисторе. С достаточной точностью можно считать, что Fмакc — частота, на которой коэффициент усиления транзистора по мощности равен единице.
Коэффициент шума Кш — отношение полной мощности шумов на выходе транзистора к части мощности, вызываемой тепловыми шумами сопротивления источника сигнала. Коэффициент шума выражается в децибелах. Его значение дается для определенного частотного диапазона. Для большинства транзисторов минимальные шумы наблюдаются при работе на частотах 1000.. .4000 Гц. На высоких и низких частотах шумы увеличиваются. Обычно минимальное значение Рш соответствует малым токам коллектора (0,1...0,5 мА) и малым коллекторным напряжениям (0,5... 1,5 В). Шумы резко увеличиваются при повышении температуры. Приводимые в справочных данных значения Рд, относятся к оптимальному внутреннему сопротивлению источника сигнала и режиму работы, которые и следует использовать при проектировании малошумящих усилителей.
Параметры большого сигнала характеризуют работу в режимах, при которых токи и напряжения между выводами транзистора меняются в широких пределах. Эти параметры используются для расчета ключевых схем, предоконечных и оконечных усилителей низкой и высокой частоты, автогенераторов. Статический коэффициент усиления по току: Вcт=(Iк-Iко)/(Iб+Iко). В рассматриваемом случае ток коллектора и ток базы существенно превосходят тепловой ток коллектора 1„„, поэтому на практике пользуются формулой: Вст=Iк/Iб.
Статическая крутизна прямой передачи Sст — отношение постоянного тока коллектора к постоянному напряжению на входе транзистора. Параметр Sст используется для транзисторов средней и большой мощности, работающих в схемах, где источник входного сигнала имеет малое внутреннее сопротивление.
Напряжение между коллектором и эмиттером транзистора в режиме насыщения измеряется при определенном значении коллекторного и базового токов или определенной глубине насыщения. Глубина насыщения — это отношение прямого тока базы к току, при котором транзистор находится на границе насыщения. Напряжение между базой и эмиттером транзистора в режиме насыщения измеряется при тех же условиях, что и напряжение между коллектором и эмиттером транзистора в режиме насыщения.
Время рассасывания Тр — интервал времени между моментом подачи на базу транзистора запирающего импульса и моментом, когда напряжение на коллекторе достигает уровня (0,1...0,3)Е„ — напряжение питания коллекторной цепи). Время рассасывания зависит от глубины насыщения транзистора и измеряется при определенном значении коллекторного и базового токов.
Параметры предельных режимов работы. Максимальная мощность, рассеиваемая прибором — Раакс- Так как в транзисторах подавляющая часть рассеиваемой мощности выделяется в области коллекторного перехода, то эта мощность практически равна максимальной мощности, рассеиваемой на коллекторном переходе.
Максимальный ток коллектора — определяет максимальный ток коллектора при максимальном напряжении на коллекторе и максимально допустимой рассеиваемой мощности.
Максимальное обратное напряжение между коллектором и базой транзистора - Этот параметр используется обычно для расчета режима работы запертого транзистора или при включении его по схеме ОБ и генератора тока в цепи эмиттера.
Максимальное обратное напряжение на переходе эмиттер—база . Этот параметр используется для расчета режима работы, когда на входе действует запирающее напряжение (усилители в режиме В, различные импульсные схемы).
Максимальное напряжение между коллектором и эмиттером транзистора Uкэ макс при условии короткого замыкания эмиттера с базой. В ряде случаев этот параметр приводится при условии включения между базой и эмиттером резистора заданного сопротивления.
Параметр Uкэ макс используется при расчетах режима работы транзистора, включенного по схеме с общим эмиттером и при отсутствии запирающего напряжения или когда оно мало, например, менее 1 В.
Максимальные значения токов, напряжений и мощности определяют границы области гарантированной надежности работы. Так как работа в предельном режиме соответствует самой низкой надежности, то использование предельных режимов в схемах, от которых требуется высокая надежность, не допускается.
Практика показывает, что при использовании полупроводниковых приборов в облегченных режимах надежность их работы повышается в десятки раз по сравнению с надежностью в предельном режиме.
Тепловые параметры полупроводниковых приборов устанавливают допустимые пределы или диапазоны температуры окружающей среды и самих приборов, при которых гарантируется их надежная работа.
Фильтрующие элементы
10.5. Фильтрующие элементы
Фильтрующие элементы используются в блоках питания для фильтрации сигналов, в качестве корректирующих звеньев в системах управления и т.п. Фильтры делятся на два больших класса — пассивные и активные, причем основным отличием активного фильтра является наличие усилительного элемента — обычно это ОУ. Если в фильтре содержится один реактивный элемент (емкость или индуктивность), то такой фильтр называется фильтром первого порядка, если два — то второго порядка, и т.д.
Наиболее распространенным пассивным фильтром первого порядка является интегрирующая RC-цепь, входящая в состав рассмотренного выше интегратора, который может рассматриваться как активный низкочастотный фильтр первого порядка. Этот же фильтр в технике электропитания называется Г-образным, в аудиотехнике — фильтром нижних частот (ФНЧ), а в технике управления — корректирующим или интегрирующим звеном [29]. Основными характеристиками фильтра являются АЧХ и ФЧХ. Например, для интегрирующей цепи на рис. 10.22 они описываются выражениями:

Следует отметить, что фильтры на базе RC-цепей обладают своеобразной дуальностью. Если на рис. 10.22 поменять местами элементы R и С, то получим фильтр верхних частот (ФВЧ).
Классической схемой фильтра второго порядка является последовательная RLC-цепь (рис. 10.23). Если выходной сигнал измерять на конденсаторе, получим ФНЧ (его АЧХ показана на рис. 10.24), а если на индуктивности L — ФВЧ.
Как видно из рис. 10.24, RLC-цепь обладает явными резонансными свойствами, ее АЧХ и ФЧХ описываются выражениями:

где


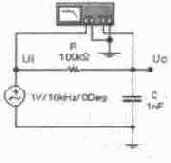
Рис. 10.22. Схема пассивного ФНЧ первого порядка

Рис. 10.23. Фильтр второго порядка

При практической реализации RLC-фильтров (особенно низкочастотных) наибольшие трудности возникают с изготовлением катушек индуктивности, их экранированием, а при больших значениях индуктивности — с проблемой массы и геометрических размеров. С появлением ОУ эти проблемы решены с использованием активных ПС-фильтров. Появились так называемые безындуктивные частотные фильтры. В качестве примера на рис. 10.25 приведена схема активного ФНЧ второго порядка на ОУ [30], АЧХ которого показана на рис. 10.26.
Из полосовых фильтров наибольшее распространение получили фильтры, АЧХ которых описывается полиномами Баттерворта, Чебышева и Бесселя; для расчета таких фильтров применяются специальные таблицы [31].
Фильтры Баттерворта. Эти фильтры характеризуются максимально плоской АЧХ в полосе пропускания. Управление величиной выходного напряжения и перестройка по частоте в широком диапазоне осуществляются в этих фильтрах проще, чем в других фильтрах, поскольку при каскадном соединении все секции настраиваются на одну и ту же частоту.
Фильтры Чебышева. Эти фильтры обеспечивают наивысшую крутизну АЧХ в переходной полосе частот. Однако при этом АЧХ в полосе пропускания приобретает колебательный характер. Чем больше неравномерность в полосе пропускания, тем выше крутизна затухания в переходной полосе частот.


Фильтры Бесселя. Фильтры Бесселя обладают максимально плоской характеристикой группового времени запаздывания (производная от ФЧХ по частоте) и линейностью ФЧХ в полосе пропускания. Однако -Крутизна затухания фильтра невелика.
В каталоге схем программы EWB имеется пример низкочастотного полосового фильтра (файл speech.са4) с полосой пропускания от 300 Гц до 3 кГц. Фильтр представляет собой два последовательно включенных фильтра четвертого порядка на ОУ (ФНЧ и ФВЧ). В каталоге имеются также схемы активных избирательных ФНЧ на базе Т-образного моста (bass-amp.ca4) и пропорционально-интегрирующий фильтр (riaa.ca4).
Контрольные вопросы и задания
1. По каким признакам классифицируются фильтрующие элементы?
2. Для ФНЧ на рис. 10.22 проведите расчет АЧХ и ФЧХ в диапазоне частот 0,1... 100 кГц и сравните их с результатами моделирования.
3. Для фильтра второго порядка на рис. 10.23 рассчитайте АЧХ и ФЧХ в диапазоне частот 30... 300 Гц и сравните их с результатами моделирования.
4. Проведите моделирование активного RC-фильтра на рис. 10.25. Установить зависимость АЧХ фильтра от сопротивления резисторов R2 и R3.
Корректор нелинейности датчика
10.2. Корректор нелинейности датчика
В автоматических системах управления и измерительной технике используются корректирующие звенья различного назначения, в частности, для корректировки нелинейности датчиков. В качестве примера рассмотрим устройство линеаризации характеристики датчика, используемого для измерения влажности зерна и реализующего наиболее надежный и простой способ измерения сопротивления на постоянном токе. Нелинейность такого датчика проявляется в области малых значений влажности, где зависимость сопротивления от содержания влаги носит логарифмический характер [19]. Это позволяет представить эквивалентную схему датчика в виде последовательно включенных резистора Rd и диода Dd (рис. 10.5). Корректирующее звено выполнено на операционном усилителе OU, в цепь отрицательной обратной связи которого включен резистор Rk последовательно с диодом Dk. Для наблюдения эффекта линеаризации введен переключатель А, который нажатием клавиши А клавиатуры замыкает диод Dk.
Для получения передаточной характеристики рассматриваемого устройства используется функциональный генератор в режиме пилообразного сигнала и осциллограф в режиме развертки В/А, при котором выходной сигнал Uo, поступающий на вход канала В, разворачивается сигналом с функционального генератора, поступающим на вход канала А.


Результаты моделирования при выключенном корректирующем диоде (в положении переключателя А, показанном на рис. 10.5) приведены на рис. 10.6, из которого видны искажения, вызванные нелинейностью датчика в области небольшой влажности, т.е. при низких уровнях сигнала на выходе датчика (при анализе осциллограмм и коэффициента передачи не забывайте, что используется инвертирующий усилитель).
Результаты моделирования при переводе выключателя в положение, соответствующее включению коррекции, показаны на рис. 10.7, откуда видно, что исчезли искажения выходного сигнала, а передаточная характеристика не имеет характерного излома, вызванного нелинейностью датчика. Для более сложной коррекции могут быть использованы универсальные функциональные преобразователи, рассмотренные в гл. 14.
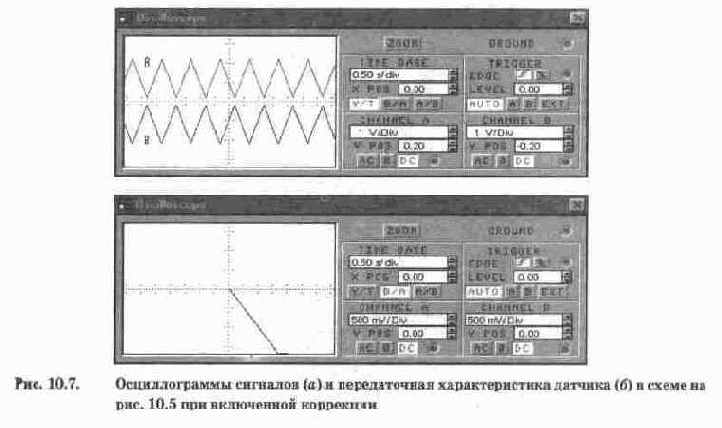
Контрольные вопросы и задания
1. С какой целью осуществляется линеаризация характеристик датчиков?
2. Из анализа данных на рис. 10.6 определите, при каких параметрах сигнала генератора получены приведенные на этих рисунках данные, если учесть, что нелинейность датчика проявляется в наибольшей степени при низких уровнях сигнала.
3. Проведите моделирование схемы на рис. 10.5 при различных типах диодов Dd и Dk. При моделировании необходимо учесть, что диоды работают в прямо смещенном режиме и их вольтамперная характеристика в таком включении описывается выражением: I=Io[exp(U/(ф)-l] или U=ln(I/Io+l), где Io — обратный (тепловой) ток; ф — температурный потенциала—n-перехода, при температуре 20° С он равен 26 мВ. Каким параметром диода в приведенной формуле необходимо варьировать, чтобы при моделировании добиться положительных результатов?
4. Проведите моделирование схемы на рис. 10.5 при сопротивлении датчика 100 Ом (учтите рекомендации п. 3).
5. Почему передаточные характеристики датчика изображены на экране осциллографа не в первом, а в четвертом квадранте?
Линии связи
13.7. Линии связи
Под линией связи понимаются разнообразные устройства для обмена информацией между различными объектами. Мы будем рассматривать проводные линии связи, примером которых может служить всем известные телефонные (и телеграфные) линии связи, с которых и началась собственно их история. Значительным событием в этой истории была прокладка первого трансатлантического кабеля в 1858 г. Поздравительная телеграмма по случаю завершения столь грандиозного и дорогостоящего проекта королевы Виктории президенту Соединенных Штатов длинной в 100 слов потребовала около 16 часов для передачи — не очень впечатляющая скорость передачи данных даже по тем временам, когда 25 слов в минуту считалось нормальным для наземной связи (при сравнительно коротких линиях связи). Тогдашние связисты обнаружили, что когда напряжение прикладывалось к одному концу такого длинного кабеля, оно не появлялось немедленно на другом конце и вместо скачкообразного нарастания достигало установившегося значения спустя определенный промежуток времени. Когда напряжение на входе кабеля отключали, напряжение на приемном конце не падало резко, а медленно снижалось. Кабель вел себя как губка. В попытке обойти "медлительность" кабеля с целью повышения скорости передачи данных на передающей стороне начали повышать уровень сигнала, пока в конечном счете, спустя 11 недель после прокладки, не пробили изоляцию кабеля и он стал бесполезным. Прошло еще 8 лет, когда через Атлантику проложили другой кабель. Достаточно большой интервал, однако в течение этого времени удалось разобраться в происшедшем и решить многие задачи теории передачи данных с использованием проводных линий связи. Одним из ученных, принимавших активное участие в решении этих задач, был Вильям Томсон, позже получивший титул лорда Кельвина.
В радиотехнических приемо-передающих устройствах такие линии используются для связи передатчика и приемника с антенной, их часто называют фидерными устройствами. Это сравнительно короткие по протяженности линии связи, однако проблем здесь более чем достаточно.
Линии связи (ЛС) в EWB представлены двумя моделями: идеальной двухпроводной ЛС без потерь (рис. 13.31, а) и с потерями (рис. 13.31, б). Математическая модель ЛС с потерями состоит из набора одинаковых звеньев. Схема такого звена (сегмента) показана на рис. 13.32, в, на котором обозначено (обозначения EWB 5.0):
R — активное (омическое) сопротивление проводников ЛС, отнесенное к единице длины (погонное сопротивление), Ом/м; для реальных ЛС в зависимости от ее конструкции к этому сопротивлению добавляются активные сопротивления потерь, вызванные поверхностным эффектом (плотность тока у поверхности проводника больше, чем в центре), эффектом близости (эффект взаимодействия вихревых токов проводников ЛС, возникающих под действием магнитного поля проводников из-за протекающих по ним токов) и вихревыми токами, наводимыми в окружающих ЛС проводящих поверхностях (например, в металлическом экране);
L — погонная индуктивность проводников ЛС, Гн/м;
G — погонная проводимость между проводниками ЛС, См/м; для реальных ЛС к этой проводимости добавляются проводимости, вызванные диэлектрическими потерями изоляционных материалов;
С — погонная емкость между проводниками, Ф/м.


Значения параметров ЛС в EWB 4.1 задаются с помощью диалоговых окон на рис. 13.32 и 13.33. В окне на рис. 13.32 задаются значения параметров эквивалентной схемы на рис. 13.31, в (с индексом "t" для EWB 4.1), длину ЛС Len, м (LEN в EWB 5.0) и параметр п, определяющий количество элементарных секций (рис.13.31, в) в ЛС выбранной длины LEN (в EWB 5.0 этот параметр отсутствует). Параметр п может быть выбран в пределах от 1 до 128 в одном компоненте на рис. 13.31, б; если этого недостаточно, то последовательно включается несколько таких компонентов.
В диалоговом окне для идеальной (R=0, G=0) ЛС на рис. 13.33 обозначено:
Zo — волновое сопротивление, Ом; Td — время задержки распространения сигнала, с (параметры ZO и TD в EWB 5.0). Параметр п имеет аналогичное с рис. 13.32 назначение.
Выражение для волнового сопротивления наглядно получается из условия равенства энергии электрического поля конденсатора и магнитного поля индуктивности для идеальной ЛС. Это условие для амплитуд тока Im и напряжения Um
запишется в виде известной формулы:

откуда волновое сопротивление

Время задержки сигнала при прохождении ЛС длиной I определяется формулой:

где с — скорость распространения электромагнитного поля вдоль линии, принимается равной скорости света в вакууме (3-108 м/с); при наличии диэлектрика скорость распространения может уменьшиться на 10... 15% и более (определяется коэффициентом укорочения волны, приблизительно равном корню квадратному из диэлектрической проницаемости диэлектрика). Скорость распространения связана с параметрами ЛС следующим соотношением:

Если принять, что длина ЛС LEN измеряется в метрах и скорость распространения равна 3-108 м/с, то на основании выражения (13.16) параметры L и С необходимо выбирать из условия:

Только при соблюдении условия (13.17) будет однозначная связь между длиной линии в метрах, погонной емкостью в Ф/м, погонной индуктивностью в Гн/м и как следствие — возможность сопоставления результатов моделирования с результатами приведенных ниже расчетов. С учетом последнего обстоятельства целесообразно также обеспечить условие независимости волнового сопротивления, определяемого формулой (13.14), от частоты (условие неискажающей ЛС) [51], которое имеет следующий вид:


Рассмотрим некоторые режимы работы ЛС.
Режим бегущей волны характерен для ЛС, на выходе которой включено активное сопротивление, равное волновому сопротивлению ZO. Для такого режима мгновенное значение напряжения в любой точке ЛС описывается следующим выражением [58]:

где 1 — расстояние от начала ЛС до точки, в которой определяется значение напряжения; со — частота входного сигнала Ui; Р, а — постоянные затухания и сдвига фазы

R — активное (омическое) сопротивление проводников ЛС, отнесенное к единице длины (погонное сопротивление), Ом/м; для реальных ЛС в зависимости от ее конструкции к этому сопротивлению добавляются активные сопротивления потерь, вызванные поверхностным эффектом (плотность тока у поверхности проводника больше, чем в центре), эффектом близости (эффект взаимодействия вихревых токов проводников ЛС, возникающих под действием магнитного поля проводников из-за протекающих по ним токов) и вихревыми токами, наводимыми в окружающих ЛС проводящих поверхностях (например, в металлическом экране);
L — погонная индуктивность проводников ЛС, Гн/м;
G — погонная проводимость между проводниками ЛС, См/м; для реальных ЛС к этой проводимости добавляются проводимости, вызванные диэлектрическими потерями изоляционных материалов;
С — погонная емкость между проводниками, Ф/м.


Значения параметров ЛС в EWB 4.1 задаются с помощью диалоговых окон на рис. 13.32 и 13.33. В окне на рис. 13.32 задаются значения параметров эквивалентной схемы на рис. 13.31, в (с индексом "t" для EWB 4.1), длину ЛС Len, м (LEN в EWB 5.0) и параметр п, определяющий количество элементарных секций (рис.13.31, в) в ЛС выбранной длины LEN (в EWB 5.0 этот параметр отсутствует). Параметр п может быть выбран в пределах от 1 до 128 в одном компоненте на рис. 13.31, б; если этого недостаточно, то последовательно включается несколько таких компонентов.
В диалоговом окне для идеальной (R=0, G=0) ЛС на рис. 13.33 обозначено:
Zo — волновое сопротивление, Ом; Td — время задержки распространения сигнала, с (параметры ZO и TD в EWB 5.0). Параметр п имеет аналогичное с рис. 13.32 назначение.
Выражение для волнового сопротивления наглядно получается из условия равенства энергии электрического поля конденсатора и магнитного поля индуктивности для идеальной ЛС. Это условие для амплитуд тока !„ и напряжения U„
запишется в виде известной формулы:
откуда волновое сопротивление

Время задержки сигнала при прохождении ЛС длиной I определяется формулой:

где с — скорость распространения электромагнитного поля вдоль линии, принимается равной скорости света в вакууме (3-108 м/с); при наличии диэлектрика скорость распространения может уменьшиться на 10... 15% и более (определяется коэффициентом укорочения волны, приблизительно равном корню квадратному из диэлектрической проницаемости диэлектрика). Скорость распространения связана с параметрами ЛС следующим соотношением:

Если принять, что длина ЛС LEN измеряется в метрах и скорость распространения равна 3-108 м/с, то на основании выражения (13.16) параметры L и С необходимо выбирать из условия:

Только при соблюдении условия (13.17) будет однозначная связь между длиной линии в метрах, погонной емкостью в Ф/м, погонной индуктивностью в Гн/м и как следствие — возможность сопоставления результатов моделирования с результатами приведенных ниже расчетов. С учетом последнего обстоятельства целесообразно также обеспечить условие независимости волнового сопротивления, определяемого формулой (13.14), от частоты (условие неискажающей ЛС) [51], которое имеет следующий вид:

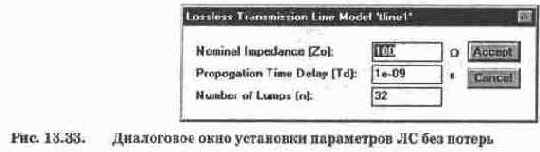
Рассмотрим некоторые режимы работы ЛС.
Режим бегущей волны характерен для ЛС, на выходе которой включено активное сопротивление, равное волновому сопротивлению ZO. Для такого режима мгновенное значение напряжения в любой точке ЛС описывается следующим выражением [58]:

где 1 — расстояние от начала ЛС до точки, в которой определяется значение напряжения;

Из формулы (13.19) видно, что амплитуда бегущей волны напряжения убывает вдоль линии по экспоненциальному закону.
Если выполняются условия

то для определения постоянной
затухания и сдвига фазы пользуются приближенными выражениями:

Для моделирования ЛС в режиме бегущей волны используем схему на рис. 13.34. Значения параметров ЛС LT1: LEN=100 м, R=1 Ом/м, п=100. Задаемся значением L=11,11 мкГн/м, после чего с помощью формул (13.17), (13.14) и (13.18) находим С=1 пф/м, Z0=3333 Ом, G=107 См/м.
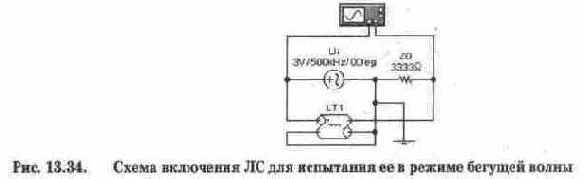
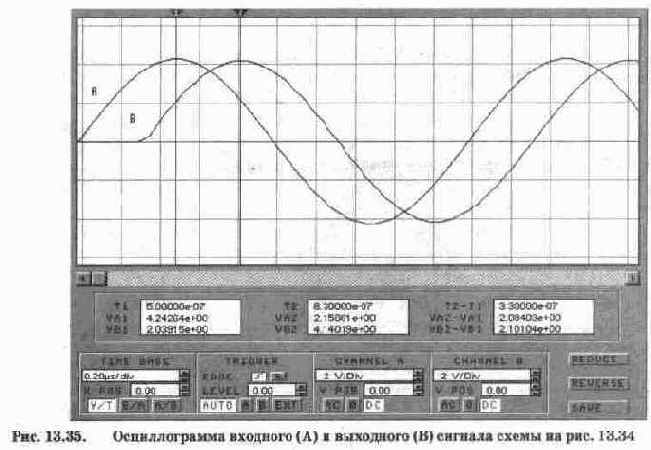
Результаты моделирования ЛС представлены в виде осциллограмм напряжения на рис. 13.35, откуда видно, что выходное напряжение опаздывает (см. правое индикаторное окно) на Т2-Т1=0,33 мкс, что при частоте входного сигнала 500 кГц (период 2 мкс) соответствует -a=l, 0362 рад на 100 м. По формулам (13.22) получаем а=0,1046 рад/м и [3=0,00015+0,00017=0,00032 неп/м (непер — единица затухания, применяемая чаще всего в проводной связи и равная 8,68 дБ), т.е. расчетное значение фазовой постоянной на 100 м составляет 1,046 рад, что близко к полученному при моделировании. Из индикаторных окон на рис. 13.35 видно, что амплитуда входного напряжения Uim=VA1=4,243 В, а выходного Uon,=VB2 = 4,14 В. Согласно (13.19), расчетное значение Uom=Uimexp(-Bl)=4,ll В, что тоже близко к полученному при моделировании.
Режим не согласованной линии характеризуется тем, что на ее выходе включено сопротивление Z, не равное волновому сопротивлению ZO. Наиболее ярко этот режим проявляется при разомкнутой или замкнутой (Z=0) линии. При разомкнутой линии бегущая волна тока достигает конца линии и заряды дальше двигаться не могут. Ток должен прекратиться. Но убывание тока создает по правилу Ленца ЭДС самоиндукции, направленную попутно с убывающим током. Появление же этой ЭДС приводит к повышению напряжения на конце линии, что в свою очередь вызывает движение зарядов в обратном направлении.
Следовательно, дойдя до разомкнутого конца линии, волны вынуждены двигаться в обратном направлении. Это явление называется отражением волны от конца линии. Энергия отраженных волн возвращается к началу линии. Электрические заряды прямой и обратной волн у конца провода складываются, в результате чего в этом месте в каждый момент времени получается удвоенное напряжение.
Для характеристики линии в рассматриваемом режиме используется коэффициент отражения [58]:

При Z=ZO, коэффициент р==0 и в линии наступает режим бегущей волны. При разомкнутой линии р=1. При этом в конце линии амплитуды напряжения и тока определяются выражениями:

Следовательно, при разомкнутой линии ток в ее конце равен нулю, а амплитуда напряжения равна двойной амплитуде падающей волны Un. При этом падающие и отраженные волны напряжения имеют одинаковую фазу, а волны тока — противоположную.
При замкнутой линии Z=0 и, как следует из (13.23), р=-1. При этом в конце линии амплитуды напряжения и тока определяются выражениями:

Следовательно, при замкнутой линии напряжение в ее конце равно нулю, а амплитуда тока равна двойной амплитуде падающей волны In. При этом падающие и отраженные волны тока имеют одинаковую фазу, а волны напряжения — противоположную.
Наиболее просто моделируется режим разомкнутой линии. Для этого достаточно удалить сопротивление ZO в схеме на рис. 13.34, уменьшить до минимума потери (установлено R=0,001 Ом/м, G=10-12 См/м) и изменить частоту входного сигнала таким образом, чтобы на длине линии LEN укладывалось целое число длин волн. Выберем длину волны 50 м, что соответствует частоте входного сигнала 3.108'/50=6 Мгц. Результаты моделирования для этого случая показаны на рис. 13.36, откуда видно, что при входном напряжении Ui=Un=VAl=4,24 В напряжение в конце линии U=VB2=8,44 В, что близко к ожидаемому. Из рис. 13.36 видно также, что отраженная волна опаздывает от падающей на Т2-Т1=1,8 нс, что составляет около 0,067 рад (3,84°), что объясняется несовершенством модели и погрешностью моделирования.

Контрольные вопросы и задания
1. Для каких целей используются линии связи?
2. Какими эквивалентными параметрами характеризуются линии связи?
3. Проведите расчеты постоянной затухания и фазы по формулам (13.20), (13.21) и сравните результаты с полученными по приближенным формулам (13.22) при указанных в тексте значениях параметров линии.
4. Рассчитайте время задержки по формуле (13.15) и сравните полученный результат с результатами моделирования схемы на рис. 13.34 по условиям п.З.
5. Проведите моделирование схемы на рис. 13.34 при R=10 Ом/м и при выполнении условия неискажающей линии. Результаты моделирования сравните с расчетными.
6. Проведите исследование схемы на рис. 13.34 в режиме холостого хода (при разомкнутой ЛС) при частоте входного сигнала 3 МГц. Сколько длин волн укладывается в этом случае на всей длине линии?
7. Проведите исследование схемы на рис. 13.34 в режиме холостого хода при частоте входного сигнала 2 МГц. Объясните, почему отраженные волны имеют форму, напоминающую амплитудно-модулированные колебания?
Логарифмические усилители
10.6 Логарифмические усилители.

Для создания усилителей с логарифмической амплитудной характеристикой чаще всего используется прямая ветвь вольт-амперной характеристики р—n-пере-хода. Эта характеристика описывается зависимостью (см. разд. 4.7)

Если обеспечить

то в выражении (10.7) единицей можно пренебречь и, следовательно,
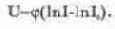
Поскольку I=Ui/R, выходное напряжение усилителя равно

Для антилогарифмического усилителя (диод D и резистор R меняются местами)

Моделирование логарифмического усилителя (рис. 10.27) целесообразно проводить в следующем порядке:
О для диода D выберите Io=Is=108 A;
О в режиме В/А (выходной сигнал Uo, поступающий на вход В осциллографа, разворачивается по оси Х входным сигналом Ui, поступающим на вход А) получите амплитудную характеристику усилителя Uo= f(Ui);
О в режиме ZOOM осциллографа измерьте выходное напряжение в 10 точках амплитудной характеристики;
О сравните полученные данные с результатами расчета по формуле (10.9);
О обратите особое внимание на справедливость формулы (10.9) на начальном участке амплитудной характеристики (с учетом допущения (10.8));
О в случае неудовлетворительных результатов (расхождение значений Uo, полученных по амплитудной характеристике и рассчитанных по формуле (10.9)) получите отсчеты в 10 точках в режиме Y/T (по значениям Ui и Uo) и повторно проведите сравнительную оценку результатов расчета и моделирования; при малых значениях Ui (единицы и десятки милливольт) для повышения точности измерений целесообразно поступить следующим образом: резистор R отключается от интегратора и подключается к отрицательному зажиму источника постоянного напряжения, выполняющего роль источника Ui, а к выходу OU2 подключается вольтметр, и амплитудная характеристика снимается "вручную".
Контрольные вопросы и задания
1. В каких случаях используются логарифмические усилители?
2. Какие типы диодов наилучшим образом подходят для логарифмических усилителей (в качестве подсказки — эти диоды известны под именем их создателя)?
3. Проведите моделирование логарифмического усилителя на рис. 10.27 в рекомендованном объеме и порядке.
Логические элементы
9.1. Логические элементы
Известно, что математической основой цифровых вычислительных устройств является двоичная арифметика, в которой используются всего два числа — 0 и 1. Выбор двоичной системы счисления диктовался требованиями простоты технической реализации самых сложных задач с использованием всего одного базового элемента — ключа, который имеет два состояния: включен (замкнут) или выключен (разомкнут). Если первое состояние ключа принять за условную (логическую) единицу, то второе будет отражать условный (логический) ноль или наоборот. Возможные комбинации показаны на рис. 9.1, 9.2 и 9.3.
На рис. 9.1 показаны ключи 1 и 0, управляемые клавишами 1 и 0 соответственно, и вспомогательные устройства в виде батареи 5 В с внутренним сопротивлением 100 Ом и лампа накаливания на 6 В с мощностью 30 мВт, которые позволяют судить о состоянии ключа: если он находится в положении 1, лама горит (рис. 9.1, а), или не горит, если он находится в положении 0 (рис. 9.1, б).

Возможно другое расположение ключей по отношению к вспомогательным устройствам, показанное на рис. 9.2. В этих схемах состояние индикаторов нуля или единицы противоположно показанному на рис. 9.1. При нажатии на клавишу 1 индикатор фиксирует состояние 0 (рис. 9.2, а) и наоборот (рис. 9.2, б). Следовательно, схемы на рис. 9.2 по выходному сигналу (состоянию индикаторных лампочек) об-ратны (инверсны) по отношению к схемам на рис. 9.1. Поэтому такие ключи называют инверторами,
Поскольку в цифровых системах содержится огромное количество ключей (только в одном микропроцессоре их несколько миллионов) и они не могут сообщать друг другу о своем состоянии миганием лампочек, то для взаимного обмена информацией используются электрические сигналы напряжения. При этом ключи, как правило, применяются в инверсном режиме в соответствии со схемами на рис. 9.3,
На рис. 9.3 сопротивление 490 Ом имитирует внутреннее сопротивление нагрузки ключа (аналог коллекторного сопротивления в транзисторном ключе), сопротивление 10 Ом — сопротивление замкнутого электронного ключа, сопротивление 500 Ом — сопротивление разомкнутого ключа с учетом внешней нагрузки. Как видно из рис. 9.3, наличие на выходе логического нуля (инверсия 1) индицируется напряжением 100 мВ (в практических конструкциях может быть и больше), а наличие логической единицы — напряжением 2,55 В (нормируется на уровне 2,4 В). Электронные ключи проектируются таким образом, чтобы при наихудших сочетаниях входных и выходных параметров ключи могли различать сигналы логической единицы и нуля.

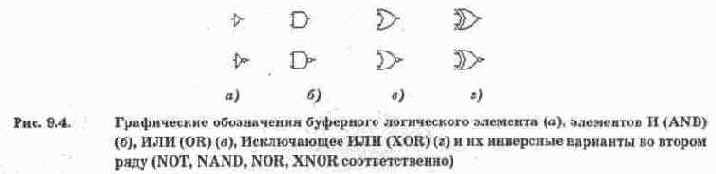

В цифровой технике практические аналоги рассмотренных схем принято называть логическими элементами. При этом в зависимости от выполняемых функций каждый элемент имеет свое название и соответствующее графическое обозначение. На рис. 9.4 показаны обозначения базовых логических элементов, принятые в программе EWB 4.1.
Электромеханическим аналогом буферного элемента являются имитаторы на рис. 9.3, а логического элемента НЕ (NOT) — на рис. 9.2 и 9.3. Электромеханические аналоги двухвходовых элементов И, И-НЕ показаны на рис. 9.5.
При наличии в программе EWB такого замечательного инструмента, как логический преобразователь, исследования логических схем целесообразно проводить с его помощью. В качестве примера на рис. 9.6 приведена схема для исследования элемента Исключающее ИЛИ.
Подключение исследуемого элемента к логическому преобразователю очевидно из рис. 9.6. Очевидно также и то, что при наличии двух входов возможны только четыре комбинации входных сигналов, что отображается на экране преобразователя в виде таблицы истинности, которая генерируется после нажатия клавиши

Для получения булева выражения исследуемого элемента необходимо нажать клавишу

Это выражение приводится на дополнительном дисплее, расположенном в нижней части лицевой панели, в виде двух слагаемых, соответствующих выходному сигналу ИСТИНА (сигнал логической единицы на выходе OUT). Сопоставление полученного выражения с таблицей истинности убеждает нас в том, что таких комбинаций действительно две, если учесть, что в полученном выражении приняты следующие обозначения: А'=0 — инверсия А=1, ТУ=0 — инверсия В=1, знак + соответствует логической операции ИЛИ.

С помощью логического преобразователя можно проводить не только анализ логических устройств, но и их синтез. Допустим, что нам требуется составить схему и булево выражение для логического элемента, у которого выходная комбинация в таблице истинности не ОНО, как на рис. 9.6, а 1101. Для внесения необходимых изменений отмечаем курсором в столбце OUT подлежащий изменению символ, изменяем его с помощью клавиатуры и затем, перемещаясь по столбцу клавишами управления курсором, изменяем по необходимости символы в других строках. После внесения всех изменений последовательно нажимаем на клавиши

В более общем случае для выполнения синтеза целесообразно действовать следующим образом. Щелчком курсора по иконке логического преобразователя непосредственно на линейке приборов раскрываем его лицевую панель. Активизируем курсором клеммы-кнопки А, В...Н (начиная с А), количество которых равно количеству входов синтезируемого устройства. Вносим необходимые изменения в столбец OUT и после нажатия на панели преобразователя указанных выше клавиш управления получаем результат в виде схемы на рабочем поле программы и булево выражение в дополнительном дисплее.

В заключение заметим, что для двухвходовых элементов на рис. 9.4 можно увеличить количество входов до восьми, открывая двойным щелчком по значку компонента диалоговое окно (рис. 9.8). По умолчанию в этом окне указано минимально возможное число входов, равное двум.
Контрольные вопросы и задания
1. Известно, что единицей измерения информации является бит. Какие значения может принимать эта единица?
2. Проведите моделирование оставшихся без рассмотрения двухвходовых логических элементов на рис. 9.4 с использованием логического преобразователя и установите для каждого из них соответствие таблицы истинности и булева выражения.
3. Разработайте схемы электромеханических имитаторов двухвходовых логических элементов на рис. 9.4 (за исключением элемента И).
4. Проведите синтез трехвходового логического устройства с выходной комбинацией 10011110 таблице истинности.
5. Установите различия в булевых выражениях и графических обозначениях логических элементов программы EWB от принятых в отечественной научно-технической литературе[20, 21].
Меню Block
15.7. Меню Block
Меню Block предназначено для перемещения, копирования, удаления, импортирования и экспортирования выделенных компонентов печатных плат. Меню содержит следующие команды.
Move, Delete, Copy — перемещение, удаление и копирование элементов на рабочем поле программы; выполняются аналогично команде Components> Move block.
Continue — продолжение выполнения одной из первых трех команд, если они были завершены нажатием правой кнопки мыши.
Undo — отмена изменений, внесенных одной из первых трех команд. Import, Export — команды импорта и экспорта блоков печатных плат.
Include... — уточнение содержимого переносимого блока при выполнении команд импорт/экспорт; команда сопровождается вызовом окна общих настроек в режиме закладки Block (рис. 15.15). В окне можно ввести ограничения на импорт/экспорт изображений компонентов, проводников, текста или полигонов.
Оперативное запоминающее устройство
9.12. Оперативное запоминающее устройство
Оперативные запоминающие устройства (ОЗУ) являются неотъемлемой частью микропроцессорных систем различного назначения. ОЗУ делятся на два класса: статические и динамические. В статических ОЗУ запоминание информации производится на триггерах, а в динамических — на конденсаторах емкостью порядка 0,5 пФ. Длительность хранения информации в статических ОЗУ не ограничена, тогда как в динамических она ограничена временем саморазряда конденсатора, что требует специальных средств регенерации и дополнительных затрат времени на этот процесс.

Конструктивно любое ОЗУ состоит из двух блоков — матрицы запоминающих элементов и дешифратора адреса. По технологическим соображениям матрица чаще всего имеет двухкоординатную дешифрацию адреса — по строкам и столбцам. На рис. 9.45 показана матрица 16-битного статического ОЗУ. Матрица состоит из 16 ячеек памяти mem_i, схема которой приведена на рис. 9.46. Каждая ячейка памяти адресуется по входам X, Y путем выбора дешифраторами адресных линий по строкам АхО...АхЗ и по столбцам АуО...АуЗ (см. рис. 9.45) и подачи по выбранным линиям сигнала логической единицы. При этом в выбранной ячейке памяти срабатывает двухвходовой элемент И (U1), подготавливая цепи чтения-записи информации на входных DIO...DI3 или выходных DOO...D03 разрядных шинах. Разрешающим сигналом для выдачи адреса является CS (chip select — выбор кристалла), который подается на вход разрешения счетчика адреса (Addr_cnt) или такой же вход дешифраторов, подключенных к выходам счетчика.
При записи в ячейку памяти (см. рис. 9.46) на соответствующей разрядной шине устанавливается 1 или 0, на входе WR/RD' устанавливается сигнал 1 и после стробирования счетчика или дешифраторов адреса сигналом CS срабатывают элементы 2И U1, U2. Положительный перепад сигнала с элемента U2 поступает на тактовый вход D-триггера U4, в результате чего в нем записывается 1 или 0 в зависимости от уровня сигнала на его D-входе.


При чтении из ячейки памяти на входе WR/RD' устанавливается 0, при этом срабатывают элементы U1, U3, U5 и на вход РАЗРЕШЕНИЕ ВЫХОДА буферного элемента U6 поступает разрешающий сигнал, в результате чего сигнал с Q-выхода D-триггера передается на разрядную шину DOO...D03. Для проверки функционирования ячейки памяти используется генератор слова (рис. 9.47).
Современные запоминающие устройства статического типа отличаются высоким быстродействием и в микропроцессорных системах используются ограниченно из-за сравнительно высокой стоимости. В таких системах они используются только в качестве так называемой кэш-памяти [22]. Cache (запас) обозначает быстродействующую буферную память между процессором и основной памятью, служащую для частичной компенсации разницы в скорости процессора и основной памяти — в нее заносятся наиболее часто используемые данные. Когда процессор первый раз обращается к ячейке памяти, ее содержимое параллельно копируется в кэш, и в случае повторного обращения может быть с гораздо большей скоростью из нее извлечено. При записи в память информация попадает в кэш и одновременно копируется в память (схема Write Through — прямая или сквозная запись) или копируется через некоторое время (схема Write Back — обратная запись). При обратной записи, называемой также буферизованной сквозной записью, информация копируется в память в первом же свободном такте, а при отложенной (Delayed Write) — когда для помещения в кэш нового значения не оказывается свободной области; при этом в основное ОЗУ вытесняются сравнительно редко используемые данные. Вторая схема более эффективна, но и более сложна за счет необходимости поддержания соответствия содержимого кэша и основной памяти.
Кэш-память состоит из области данных, разбитой на блоки (строки), которые являются элементарными единицами информации при работе кэша, и области признаков (tag), описывающей состояние строк (свободна, занята, помечена для дозаписи и т.п.). В основном используются две схемы организации кэша: с прямым отображением (direct mapped), когда каждый адрес памяти может кэшироваться только одной строкой (в этом случае номер строки определяется младшими разрядами адреса), и га-связный ассоциативный (ra-way associative), когда каждый адрес может кэшироваться несколькими строками. Ассоциативный кэш более сложен, однако позволяет более гибко кэшировать данные; наиболее распространены четырехсвязные системы кэширования.
Микропроцессоры 486 и выше имеют также внутренний (Internal) кэш объемом 8...16 Кбайт. Он также обозначается как Primary (первичный) или LI (Level I — первый уровень) в отличие от внешнего (External), расположенного на плате и обозначаемого Secondary (вторичный) или L2. В большинстве процессоров внутренний кэш работает по схеме с прямой записью, а в 486 (процессор Intel P24D и последние DX4-100, AMD DX4-120, 5х86) и Pentium он может работать и с отложенной записью. Последнее требует специальной поддержки со стороны системной платы, чтобы при обмене по DMA (прямое обращение к памяти устройств ввода-вывода) можно было поддерживать согласованность данных в памяти и внутреннем кэше. Процессоры Pentium Pro имеют также встроенный кэш второго уровня объемом 256 или 512 Кбайт.
В микропроцессорных системах в качестве ОЗУ чаще всего используются динамические ОЗУ с запоминающим конденсатором, которые отличаются большим многообразием. Приведем данные по наиболее распространенным типам таких ОЗУ [22].
В динамической памяти ячейки выполнены на основе областей с накоплением зарядов, занимающих гораздо меньшую площадь, нежели триггеры, и практически не потребляющих энергии при хранении информации. При записи бита в такую ячейку в ней формируется электрический заряд, который сохраняется в течение нескольких миллисекунд; для постоянного сохранения заряда ячейки необходимо регенерировать (перезаписывать) ее содержимое. Ячейки микросхем динамической памяти также организованы в виде прямоугольной матрицы; при обращении к микросхеме на ее входы вначале подается адрес строки матрицы, сопровождаемый сигналом RAS (Row Address Strobe — строб адреса строки), затем, через некоторое время — адрес столбца, сопровождаемый сигналом CAS (Column Address Strobe — строб адреса столбца). При каждом обращении к отдельной ячейке регенерируются все ячейки выбранной строки, поэтому для полной регенерации матрицы достаточно перебрать адреса строк. Ячейки динамической памяти имеют сравнительно малое быстродействие (десятки — сотни наносекунд), но большую удельную плотность (порядка нескольких мегабайт на корпус) и меньшее энергопотребление.
Обычные ОЗУ называют часто асинхронными, так как установка адреса и подача управляющих сигналов могут выполняться в произвольные моменты времени, необходимо только соблюдение временных соотношений между этими сигналами. В них включены так называемые охранные интервалы, необходимые для установления сигналов. Существуют также синхронные виды памяти, получающие внешний синхросигнал, к импульсам которого жестко привязаны моменты подачи адресов и обмена данными; они позволяют более полно использовать внутреннюю конвейеризацию и блочный доступ.
FPM DRAM (Fast Page Mode DRAM — динамическая память с быстрым страничным доступом), активно используется в последнее время. Память со страничным доступом отличается от обычной динамической памяти тем, что после выбора строки матрицы и удержания сигнала RAS допускает многократную установку адреса столбца, стробируемого сигналом CAS, а также быструю регенерацию по схеме "CAS прежде RAS". Первое позволяет ускорить блочные передачи, когда весь блок данных или его часть находятся внутри одной строки матрицы, называемой в этой системе страницей, а второе — снизить затраты времени на регенерацию памяти.
EDO (Extended Data Out — расширенное время удержания данных на выходе) фактически представляют собой обычные микросхемы FPM, на выходе которых установлены регистры-защелки данных. При страничном обмене такие микросхемы работают в режиме простого конвейера: удерживают на выходах данных содержимое последней выбранной ячейки, в то время как на их входы уже подается адрес следующей выбираемой ячейки. Это позволяет примерно на 15% по сравнению с FPM ускорить процесс считывания последовательных массивов данных. При случайной адресации такая память ничем не отличается от обычной.
BEDO (Burst EDO — EDO с блочным доступом) — память на основе EDO, работающая не одиночными, а пакетными циклами чтения/записи. Современные процессоры благодаря внутреннему и внешнему кэшированию команд и данных обмениваются с основной памятью преимущественно блоками слов максимальной ширины. При наличии памяти BEDO отпадает необходимость постоянной подачи последовательных адресов на входы микросхем с соблюдением необходимых временных задержек, до- ' статочно стробировать переход к очередному слову отдельным сигналом.
SDRAM (Synchronous DRAM — синхронная динамическая память) — память с синхронным доступом, работающая быстрее обычной асинхронной (FPM/EDO/BEDO). Кроме синхронного доступа, SDRAM использует внутреннее разделение массива памяти на два независимых банка, что позволяет совмещать выборку из одного банка с установкой адреса в другом. SDRAM также поддерживает блочный обмен. Основное преимущество SDRAM состоит в поддержке последовательного доступа в синхронном режиме, где не требуется дополнительных тактов ожидания. При случайном доступе SDRAM работает практически с той же скоростью, что и FPM/EDO.
РВ SRAM (Pipelined Burst SRAM — статическая память с блочным конвейерным доступом) — разновидность синхронных SRAM с внутренней конвейеризацией, за счет которой примерно вдвое повышается скорость обмена блоками данных.
Кроме основного ОЗУ, устройством памяти снабжается и устройство отображения информации — видеодисплейная система. Такая память называется видеопамятью и располагается на плате видеоадаптера.
Видеопамять служит для хранения изображения. От ее объема зависит максимально возможное разрешение видеокарты — АхВхС, где А — количество точек по горизонтали, В — по вертикали, С— количество возможных цветов каждой точки. Например, для разрешения 640х480х16 достаточно иметь видеопамять 256 Кбайт, для 800х600х256 — 512 КБ, для 1024х768х65536 (другое обозначение — 1024x768x64k) — 2 Мбайт и т.д. Поскольку для хранения цветов отводится целое число разрядов, количество цветов всегда является целой степенью 2 (16 цветов — 4 разряда, 256 — 8 разрядов, 64k — 16 и т.д.).
В видеоадаптерах используются следующие типы видеопамяти.
FPM DRAM (Fast Page Mode Dynamic RAM — динамическое ОЗУ с быстрым страничным доступом) — основной тип видеопамяти, идентичный используемой в системных платах. Активно применялась до 1996 г. Наиболее распространенные микросхемы FPM DRAM — четырехразрядные DIP и SOJ, а также шестнадцатиразрядные SOJ.
VRAM (Video RAM — видео-ОЗУ) — так называемая двухпортовая DRAM с поддержкой одновременного доступа со стороны видеопроцессора и центрального процессора компьютера. Позволяет совмещать во времени вывод изображения на экран и его обработку в видеопамяти, что сокращает задержки и увеличивает скорость работы.
EDO DRAM (Extended Data Out DRAM — динамическое ОЗУ с расширенным временем удержания данных на выходе) — память с элементами конвейеризации, позволяющей несколько ускорить обмен блоками данных с видеопамятью.
SGRAM (Synchronous Graphics RAM — синхронное графическое ОЗУ) — вариант DRAM с синхронным доступом, когда все управляющие сигналы изменяются одновременно с системным тактовым синхросигналом, что позволяет уменьшить временные задержки.
WRAM (Window RAM — оконное ОЗУ) — EDO VRAM, в котором окно, через который обращается видеоконтроллер, сделано меньшим, чем окно для центрального процессора.
MDRAM (Multibank DRAM — многобанковое ОЗУ) — вариант DRAM, организованный в виде множества независимых банков объемом по 32 Кбайт каждый, работающих в конвейерном режиме.
Увеличение скорости обращения видеопроцессора к видеопамяти, кроме повышения пропускной способности адаптера, позволяет повысить максимальную частоту регенерации изображения, что снижает утомляемость глаз оператора.
Микросхемы памяти имеют четыре основные характеристики — тип, объем, структуру и время доступа. Тип обозначает статическую или динамическую память, объем показывает общую емкость памяти, а структура — количество ячеек памяти и разрядность каждой ячейки. Например, 28/32-выводные DIP-микросхемы SRAM имеют 8-разрядную структуру (8kx8, 16kx8, 32kx8, 64kx8, 128kx8), кэш объемом 256 Кбайт состоит из восьми микросхем 32kx8 или четырех микросхем 64kx8 (речь идет об области данных, дополнительные микросхемы для хранения признаков могут иметь другую структуру). Две микросхемы по 128kx8 поставить уже нельзя, так как нужна 32-разрядная шина данных, что могут обеспечить только четыре микросхемы. Распространенные РВ SRAM в 100-выводных корпусах PQFP имеют 32-разрядную структуру 32kx32 или 64kx32 и используются по две или по четыре в платах для Pentium.
30-контактные SIMM имеют 8-разрядную структуру и используются с процессорами 286, 386SX и 486SLC по две, а с 386DX, 486DLC и обычными 486DX — по четыре. 72-контактные SIMM имеют 32-разрядную структуру и могут использоваться с 486DX по одной, а с Pentium и Pentium Pro — по две. 168-контактные DIMM имеют 64-разрядную структуры и используются в Pentium и Pentium Pro по одной. Установка модулей памяти или микросхем кэша в количестве больше минимального для данной системной (материнской) платы позволяет ускорить работу с ними, используя принцип чередования (Interleave).
Время доступа характеризует скорость работы микросхемы и обычно указывается в наносекундах после тире в конце наименования. На более медленных микросхемах могут указываться только первые цифры (-7 вместо -70, -15 вместо -150), на более быстрых статических "-15" или "-20" обозначает реальное время доступа к ячейке. Часто на микросхемах указывается минимальное из всех возможных времен доступа, например, распространена маркировка 50 EDO DRAM вместо 70, или 45 — вместо 60, хотя такой цикл достижим только в блочном режиме, а в одиночном режиме микросхема по-прежнему имеет время доступа 70 или 60 нс. Аналогичная ситуация имеет место в маркировке РВ SRAM: 6 вместо 12, и 7 вместо 15. Микросхемы SDRAM обычно маркируются временем доступа в блочном режиме (10 или 12 нс).
ИМС памяти реализуются в корпусах следующих типов.
DIP (Dual In line Package — корпус с двумя рядами выводов) — классические микросхемы, применявшиеся в блоках основной памяти IBM PC/XT и ранних PC/AT, сейчас применяются в блоках кэш-памяти.
SIP (Single In line Package — корпус с одним рядом выводов) — микросхема с одним рядом выводов, устанавливаемая вертикально.
SIPP (Single In line Pinned Package — модуль с одним рядом игольчатых выводов) — модуль памяти, вставляемый в панель наподобие микросхем DIP/SIP; применялся в ранних IBM PC/AT.
SIMM (Single In line Memory Module — модуль памяти с одним рядом контактов) — модуль памяти, вставляемый в зажимный разъем; применяется во всех современных платах, а также во многих адаптерах, принтерах и прочих устройствах. SIMM имеет контакты с двух сторон модуля, но все они соединены между собой, образуя как бы один ряд контактов. На SIMM в настоящее время устанавливаются преимущественно микросхемы FPM/EDO/BEDO.
DIMM (Dual In line Memory Module — модуль памяти с двумя рядами контактов) — модуль памяти, похожий на SIMM, но с раздельными контактами (обычно 2х84), за счет чего увеличивается разрядность или число банков памяти в модуле. Применяется в основном в компьютерах Apple и новых платах Р5 и Р6. На DIMM устанавливаются микросхемы EDO/BEDO/SDRAM.
CELP (Card Egde Low Profile — невысокая карта с ножевым разъемом на краю) — модуль внешней кэш-памяти, собранный на микросхемах SRAM (асинхронный) или РВ SRAM (синхронный). По внешнему виду похож на 72-контактный SIMM, имеет емкость 256 или 512 Кбайт. Другое название — COAST (Cache On A STick — буквально "кэш на палочке").
Модули динамической памяти кроме основных ячеек памяти могут иметь дополнительные ячейки для хранения битов четности (Parity) для байтов данных; такие SIMM иногда называют 9- и 36-разрядными модулями (по одному биту четности на байт данных). Биты четности служат для контроля правильности считывания данных из модуля, позволяя обнаружить часть ошибок (см. разд. 9.7). Модули с битами четности имеет смысл применять лишь там, где нужна очень высокая надежность. Для обычных применений подходят и тщательно проверенные модули без битов четности, однако при условии, что системная плата поддерживает такие типы модулей.
Проще всего определить тип модуля по маркировке и количеству микросхем памяти на нем: например, если на 30-контактном SIMM две микросхемы одного типа и еще одна — другого, то две первых являются основными (каждая — по четыре разряда), а третья предназначена для хранения битов четности (она одноразрядная).
В 72-контактном SIMM с двенадцатью микросхемами восемь из них хранят данные, а четыре — биты четности. Модули с количеством микросхем 2, 4 или 8 не имеют памяти для хранения битов четности.
Иногда на модули ставится так называемый имитатор четности — микросхема-сумматор, выдающая при считывании ячейки всегда правильный бит четности. В основном это предназначено для установки таких модулей в платы, где проверка четности не отключается.
72-контактные SIMM имеют четыре специальных линии PD (Presence Detect — обнаружение наличия), на которых при помощи перемычек может быть установлено до 16 комбинаций сигналов. Линии PD используются в некоторых материнских платах для определения наличия модулей памяти в разъемах и их параметров (объема и быстродействия). В большинстве универсальных плат производства "третьих фирм", как и выпускаемые ими SIMM, линии PD не используются.
В модулях DIMM в соответствии со спецификацией JEDEC технология PD реализуется при помощи перезаписываемого ПЗУ с последовательным доступом (Serial EEPROM) и носит название Serial Presence Detect (SPD). ПЗУ представляет собой 8-выводную микросхему, размещенную в углу платы DIMM, а его содержимое описывает конфигурацию и параметры модуля. Системные платы с набором микросхем (чипсетами) 440LX/BX могут использовать SPD для настройки системы управления памятью. Некоторые системные платы могут обходиться без SPD, определяя конфигурацию модулей обычным путем.
Контрольные вопросы и задания
1. Какие типы памяти существуют?
2. Проведите моделирование ячейки статической памяти на рис. 9.46. Задачей моделирования является выбор двоичных комбинаций для сигналов на входе ячейки и регистрация результата на выходе ячейки с помощью индикатора IND.
3. На базе схемы на рис. 9.45 разработайте схему четырехразрядного ОЗУ с применением генератора слова. При этом в схеме на рис. 9.45 используйте только 4 младших адреса (два по строкам и два по столбцам) и соответственно только две шины данных (две входные и две выходные). К выходным шинам подключите индикаторы.
4. Где в современных компьютерах используется память статического типа?
5. Чем отличается динамическая память от статической?
6. Какие типы динамической памяти используются в современных компьютерах?
7. Что такое видеопамять и как она связана с характеристиками отображаемой на дисплее информации?
8. Какие типы памяти используются в качестве видеопамяти?
9. Какое конструктивное оформление имеют микросхемы памяти?
Преобразователь на интегральном таймере
11.4. Преобразователь на интегральном таймере
Интегральные таймеры являются наиболее яркими представителями устройств смешанного типа, из них наиболее популярным является таймер NE555 (отечественный аналог КР1006ВИ1). Учитывая его широкое распространение в различной аппаратуре промышленного и бытового назначения, рассмотрим кратко характеристики и особенности применения NE555 [34].
Функциональная схема таймера и его графическое обозначение в программе EWB показаны на рис. 11.5. Таймер содержит два компаратора на OU1 и OU2, RS-триггер, инвертирующий усилитель мощности UM, транзисторы VT1, VT2 для цепи разряда и принудительного сброса соответственно. Внутренний резистивный делитель задает пороговые напряжения, равные 2Ucc/3 для OU1 и Ucc/3 для OU2.
Напряжение питания таймера Ucc равно 5...16,5 В, ток нагрузки (вывод 7) — 200 мА, что позволяет управлять непосредственно лампочками или электромагнитными реле. Выходное сопротивление около 10 Ом как для низкого, так и для высокого уровней выходного напряжения. Запуск таймера осуществляется подачей на вывод 2 напряжения менее Ucc/3 (эту цепь обычно называют триггерным входом). При высоком напряжении на выводе 2 состоянием выхода таймера можно управлять с помощью компаратора OU1 по выводу 6, называемому обычно пороговым входом. Входной ток, втекающий в OU1 (вывод 6) и вытекающий из OU2 (вывод 2), не превышает 0,5 мкА. Для сброса таймера, т.е. установки на его выходе низкого напряжения независимо от напряжения на выводах 2 и 6 используется вывод 4. Если напряжение на этом выводе меньше 0,4 В, напряжение на выходе равно 0,1—0,2 В, а при напряжении больше 1 В цепь сброса выключена и не влияет на работу таймера. Кроме низкоомного выхода (вывод 3) таймер имеет и вспомогательный высокоом-ный выход (вывод 7, коллектор транзистора VT1). Этот вывод обычно используется для организации обратной связи с выхода на входы (выводы 2 и 6) таймера. Допустимое изменение напряжения на выводах 2, 4, 6 и 7 находится в пределах О...16,5 В. В таймере имеется доступ через вывод 5 к входам внутренних компараторов, на которые поданы пороговые напряжения. Этот вывод от резистивного делителя позволяет изменять пороговые напряжения компараторов при постоянном напряжении питания и тем самым дополнительно управлять работой таймера. Чтобы избежать влияния внешних помех и пульсации напряжения питания на точность работы таймера, рекомендуется шунтировать вывод 5 конденсатором емкостью 0,01 мкФ.

В режиме прямой трансляции сигнала со входа на выход таймер работает в диапазоне частот до 10 МГц. Однако приводимое в справочных данных значение погрешности формирования временного интервала, равное 0,5%, измеряется обычно при формировании импульсов длительностью более 10 мкс. Время нарастания выходного напряжения таймера не превышает 100 нс.
Временные параметры таймера слабо зависят от изменений Ucc и температуры и полностью определяются схемотехникой внутренних компараторов и качеством биполярной технологии их изготовления. В таймерах, изготовленных по КМОП-технологии, отличающейся худшим согласованием параметров парных транзисторов, зависимость характеристик от Ucc и температуры значительно выше, чем у таймеров, изготовленных по биполярной технологии.
Чтобы параметры времязадающей ЕС-цепи не влияли на точность формирования временных интервалов, необходимо ограничить диапазон изменения сопротивления R и емкости С. Максимальное сопротивление R определяется входным током I, компараторов. Для формирования устойчивых временных интервалов достаточно выбрать максимальное сопротивление R из условия Rmax<Ucc/Ii; при Ucc=10 В и Ii=0,5 мкА Rmax=20 МОм. При включении таймера по схеме мультивибратора, когда выводы 2 и 6 объединены, таймер сохраняет работоспособность при R>Rmax при этом не рекомендуется использовать времязадающие резисторы с сопротивлением R>10 МОм.
Минимальное сопротивление R определяется максимально допустимым током, протекающим через транзистор VT1 таймера при его насыщении. Хотя допустимый выходной ток устанавливают обычно на уровне 100 мА, не рекомендуется использовать малые сопротивления R в сочетании с большими емкостями С. Объясняется это тем, что при разряде конденсатора большой емкости транзистор VT1 переходит в режим насыщения через конечное время, в течение которого он находится в активном режиме при напряжении коллектор-эмиттер U«.=Ucc/2, и при Rn,,„ он может выйти из строя из-за большой рассеиваемой на нем мощности. Поэтому при формировании малых временных интервалов рекомендуется ограничиться значением Еmin=1 кОм и выбрать исходя из этого емкость С. Если же таймер применяется в схеме, где С<100 пФ, то сопротивление R может быть уменьшено до 150 Ом.
Минимальная емкость времязадающего конденсатора С должна быть значительно больше изменений емкости выводов 2, 6 и 7, зависящей от напряжения на них. Поскольку эти изменения при перезаряде С не превышают нескольких пикофа-рад, при формировании точных временных интервалов целесообразно выбирать С<100 пФ. Можно применять конденсаторы С сколь угодно большой емкости, если их ток утечки пренебрежимо мал. Фактически же, чем больше емкость конденсатора, тем больше его ток утечки. Для нормальной работы таймера необходимо, чтобы ток утечки конденсатора С не превышал зарядный ток через резистор R. Для формирования точных (<1%) временных интервалов ток утечки через С должен быть более чем на два порядка меньше зарядного тока.
Выходной инвертирующий усилитель таймера UM работает в режиме АВ, вследствие чего на переходной характеристике возникает "полка" длительностью 10...20 нс при напряжении 1,5 В. Если таймер нагружен на быстродействующие ТТЛ-схемы (например, серий 130 или 533), то наличие такой "полки" недопустимо, так как она может вызвать ложное срабатывание логического элемента. Для устранения этого недостатка необходимо выход таймера зашунтировать конденсатором емкостью около 100 пФ.
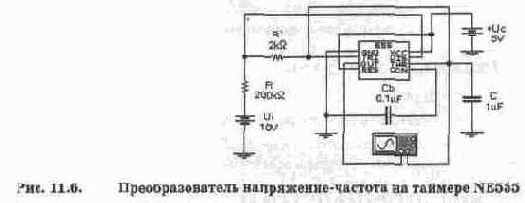
Преобразователи на интегральных таймерах отличаются весьма широким частотным диапазоном (в пределах 2...4 декад) [25]. Так, при включении таймера по схеме самовозбуждающегося мультивибратора можно получить линейный преобразователь напряжения в частоту, изменяющуюся от 10 Гц до 10 кГц, причем этот диапазон может быть легко сдвинут в любую сторону заменой одного из элементов схемы [25]. К сожалению, модель таймера NE555 в программе EWB далека от совершенства и не позволяет это реализовать. Предварительное исследование преобразователя, схема которого приведена на рис. 11.6, показало, что преобразуемое напряжение должно быть больше напряжения питания Ucc. Кроме того, схема не работает при отсутствии дополнительного сопротивления в цепи разряда интегрирующего конденсатора (транзистор VT1), поэтому сопротивление его заряда составлено из сопротивлений двух резисторов — R и R'.
В схеме на рис. 11.6 использована пассивная интегрирующая RC-цепь, поскольку преследовалась только цель проверки ее работоспособности. Для повышения линейности преобразователя на входе практического аналога схемы на рис. 11.6 используется преобразователь напряжение-ток (стабилизатор тока) [25].
Осциллограммы сигналов на выходе OUT микросхемы и конденсаторе С показаны на рис.11.7.
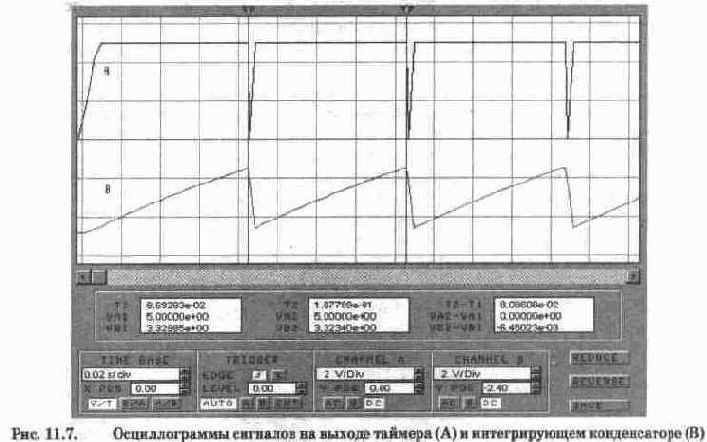
Контрольные вопросы и задания
1. Что из себя представляют интегральные таймеры и почему они так называются?
2. Чем вызвана популярность интегрального таймера NE555?
3. Проверьте работоспособность схемы преобразователя на рис.11.6 при Ui=4..40 В с оценкой линейности преобразования в этом диапазоне.
Приложения
1. Каталог схемных файлов
2. Дополнительные сведения по элементной базе
3. Из истории радиосвязи
Заключение
Программа EWB Layout
15. Программа EWB Layout
Программа EWB Layout предназначена для разработки печатных плат. Ниже приводятся ее краткое описание, составленное в результате анализа демонстрационной версии.
15.1. Рабочее окно программы
15.2. Меню File
15.3. Меню View
15.4. Меню Traces
15.5. Меню Components
15.6. Меню Texts
15.7. Меню Block
15.8. Меню Shapes
15.9. Меню Netlist
15.10. Меню Tools
15.11. Настройки общего характера.
Рабочее окно программы
15.1. Рабочее окно программы
Рабочее окно программы EWB Layout показано на рис. 15.1. В интегрированном пакете EWB+EWB Layout оно вызывается автоматически после выбора команды Export to EWB Layout из меню File программы EWB 5.0. При этом все компоненты экспортируемой из EWB схемы располагаются в верхней части рабочего поля. На рис. 15.1 показаны компоненты схемы генератора Колпитца (рис. 1.23, см. также рис. 15.25). Окно содержит поле меню, линейку инструментов с кнопками наиболее употребляемых команд, окно-видоискатель Birdseye с уменьшенной копией рабочего окна (стола), расположенное в верхнем левом углу окна над меню Trace (вертикальный блок с левой стороны окна). Это меню можно перетаскивать мышью в любое место экрана; с его помощью оперативно выбираются следующие параметры:

Draw angle — выбор угла поворота при прокладке печатных проводников (под углом, кратным 90° или 45°, или под любым углом (all angles));
Method — прокладка прямолинейных проводников (trace) или дуг окружностей (arc);
Type — назначение атрибутов проводников: неперемещаемый (fixed) или перемещаемый (variable);
Layer — вывод на передний план верхней (ТОР) или нижней (BOTTOM) стороны печатной платы;
Width — выбор ширины печатного проводника: номер набора, ширина (с:1, w:S15) — всего 32 набора (о единицах измерения см. рис. 15.17);
Via code — выбор диаметра межслойных соединений — одного из 16 наборов: номер набора, диаметр отверстия (с:0, s: S24) или вычисляемое значение (calculated);
Via Shift — сдвиг межслойного соединения.
Заметим, что по умолчанию фон рабочего поля (параметр Background color на рис. 15.6) — черный, на рис. 15.1 он заменен на белый, чтобы можно видеть изображения элементов в черно-белом исполнении. Компоненты генератора Колпитца показаны в увеличенном масштабе (см. меню View), чтобы можно было рассмотреть их изображения и позиционные обозначения. Граница печатной платы (Board) на рабочем поле выделяется синей линией с отверстием в левом нижнем углу платы (на рис. 15.1 не показано), который принят в качестве начала координат платы (текущие координаты курсора индицируются в строке состояния, расположенной в правой нижней части экрана).
Селекторы импульсов
8.6. Селекторы импульсов
Во многих устройствах прикладной электроники возникают задачи селекции (выделения) из последовательности импульсов лишь тех из них, которые обладают определенным признаком или совокупностью признаков (параметров). Устройства, выполняющие такие функции, называются селекторами. На выходе селектора сигналы должны иметь ту же форму, что и на входе. Однако во многих случаях необходимо лишь регистрировать появление сигналов с определенными признаками (т.е. с определенными значениями параметров, по которым выполняется селекция), а форма выходного импульса роли не играет. Применяемые в этих случаях устройства являются в сущности квазиселекторами, в них появление импульса с определенным признаком на входе фиксируется появлением скачка напряжения на выходе или короткого импульса. Основными параметрами, по которым осуществляется селекция, являются амплитуда, длительность или временное положение импульсов.
При амплитудной селекции (отбор импульсов, амплитуды которых находятся в заданном диапазоне) используются чаще всего рассмотренные выше диодные ограничители. Амплитудные селекторы, оснащенные средствами обработки информации и известные под названием "амплитудные анализаторы", находят широкое применение при спектрометрическом анализе радиоизотопов (результатом анализа является количественное определение содержания того или иного изотопа по количеству импульсов заданной амплитуды, пропорциональной энергии его распада).
При временной селекции (отбор импульсов по длительности, частоте следования или времени их появления относительно стартового импульса) используются различные комбинации аналоговых и цифровых устройств с достаточно сложными алгоритмами обработки сигналов, если они имеют случайный характер распределения по амплитуде и во времени (например, в ядерной электронике).
Наиболее простыми из временных селекторов являются селекторы по длительности. Эти селекторы используются для выделения из входной последовательности лишь тех импульсов, длительность которых находится в определенных пределах, причем обычно требуется лишь регистрация наличия во входной последовательности импульсов с заданными параметрами.

Среди селекторов по длительности различают селекторы импульсов максимальной длительности, минимальной или заданной длительности [54]. Как правило, во временных селекторах используется некое стартовое устройство, которое задает начало отсчета времени и затем фиксирует конец регистрируемого события. Таким образом, например, определяют энергию нейтронов по времени пролета определенного расстояния, скорость снарядов и т.д. Подобный принцип используется и в схеме на рис. 8.33.
Схема временного селектора содержит знакомый нам из предыдущего раздела генератор пилообразного напряжения со стабилизатором тока на полевом транзисторе. К схеме ГПН добавлены эмиттерный повторитель на транзисторе VT2, пороговое устройство на транзисторе VT3 и ключ на транзисторе VT4. Простейшее пороговое устройство на транзисторе VT3 срабатывает, когда напряжение на базе транзистора VT2 примерно равно сумме напряжений база-эмиттер Ube двух транзисторов VT2 и VT3 и напряжения Ub=UccRl/(Rl+R2)=l В. Полагая, что для открытых транзисторов Ube=0,65 В, получаем суммарное напряжение примерно равное 2,3 В.
Теперь обратимся к результатам моделирования, представленным на рис. 8.34. Из осциллограмм и индикаторных окон видно, что при выходном напряжении ГПН около 2,37 В (точное значение см. в строке VA1 левого индикаторного окошка), что соответствует по времени 0,58 с после начала запуска ГПН (см. строку Т1 в том же окошке), срабатывает пороговое устройство на транзисторе VT3 и открывается ключ на транзисторе VT4, что зафиксировано на нижней осциллограмме. Заметим, что ориентировочное значение порога срабатывания практически совпало с результатом моделирования.
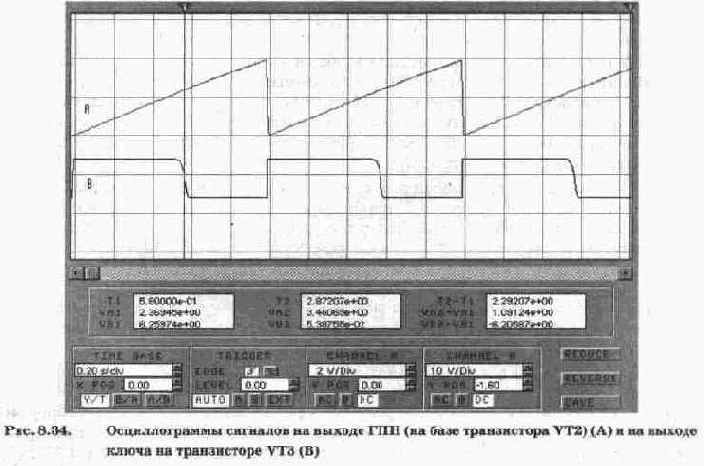
Установив факт работоспособности временного селектора, мысленно отключим генератор G и вместо него подключим источник исследуемого сигнала с амплитудой 10 В и длительностью 0,2 с. Кроме того, подключим этот источник и к двухвходовой схеме совпадения (логический элемент И), ко второму входу этой схемы через инвертор подключим выход ключа на транзисторе VT4. Теперь поставим задачу — отвечает ли исследуемый сигнал условиям отбора (селекции) по длительности, которая должна находиться в пределах от 0,6 до 0,98 с. Если длительность исследуемого сигнала находится в указанных пределах, то на выходе схемы совпадения регистрируется сигнал совпадения. При длительности же 0,2 с этого не произойдет.
Рассмотренный пример использования устройства на рис. 8.33 является, естественно, не единственным.
Контрольные задания
1. С помощью схемы на рис. 8.33 установите зависимость времени срабатывания порогового устройства от напряжения, задаваемого делителем на резисторах R1 иК2.
2. Составьте аналитическое выражение, устанавливающее зависимость времени срабатывания порогового устройства от порогового напряжения, равного 2Ube-l-UccRl/(Rl+R2).
Структурное моделирование
14.6. Структурное моделирование
При структурном моделировании моделируемая система, например, система автоматического управления задается в виде структурной схемы, в которую могут быть включены и отдельные ее реальные элементы (регуляторы, исполнительные органы и т.п.). В структурной схеме задаются параметры основных звеньев и указываются ориентировочные пределы изменения варьируемых параметров, например, коэффициентов усиления и постоянных времени звеньев. Моделирование каждого звена системы-оригинала осуществляется в отдельности, а затем из моделей звеньев составляется общая модель, точно воспроизводящая структурную схему оригинала.
Метод структурного моделирования имеет по сравнению с методом моделирования по уравнению то преимущество, что он позволяет включить в состав модели элементы реальной системы регулирования и легко подбирать параметры каждого звена модели, добиваясь желаемого закона регулирования. Кроме того, такой метод дает ясное представление о соответствии параметров исследуемой системы ее модели, что создает определенные удобства как при подборе параметров самих звеньев, так и корректирующих связей. Так как параметры каждого звена модели однозначно связаны с параметрами соответствующих звеньев реальной системы через постоянные масштабы, то полученные при моделировании результаты могут быть пересчитаны затем в параметры звеньев реальной системы, при которых достигается требуемый закон управления.
Для проведения структурного моделирования необходимо располагать моделями (схемами набора) элементарных звеньев систем управления. Рассмотрим такие модели, используя данные работ [63 — 65]. При составлении моделей будем придерживаться системы обозначений, принятых в [29] и использованных в разд. 14.1 и 14.4.
Апериодическое звено. Коэффициент передачи такого звена:

где Хо(р), Xi(p) — выходная и входная величины соответственно; К — коэффициент усиления звена; Т — постоянная времени звена; p=d/dt — оператор Лапласа.
Запишем выражение (14.27) в следующем виде:

Введем масштаб по времени Мt тогда оператор Лапласа в формуле (14.28) заменяется на P-Mt и машинное уравнение модели может быть записано следующим образом:

где

Выражение (14.29) позволяет нам достаточно наглядно проследить процесс формирования схемы набора. Действительно, из (14.29) видно, что он должен содержать интегратор, о чем говорит множитель 1/Р, при этом он должен одновременно выполнять и функции сумматора двух слагаемых (суммирующий интегратор). В таком случае модель в первом приближении может быть представлена в виде схемы на рис. 14.50, а. При выполнении условий

с учетом выражений (14.30) выходное напряжение схемы на рис. 14.50, а будет равно -Хо и, следовательно, выход можно соединить со вторым входом, поскольку они эквипотенциальны. Таким образом, окончательная схема набора для апериодического звена будет иметь вид на рис. 14. 50, б, а его коэффициент усиления, как видно из выражений (14.30) и (14.31), определяется формулой K=K1/K2=R2/R1.
Как видно из приведенного анализа, нами было использовано масштабирование только по времени. Объясняется это тем, что масштабирование вводится с целью обеспечения проведения моделирования в рамках технических возможностей компонентов модели. Это в первую очередь относится к возможным перегрузкам операционных усилителей по максимально допустимому выходному напряжению (например, в случае интеграторов). Однако такие ограничения устраняются не только за счет масштабирования по входному и выходному напряжению, но и за счет введения масштаба по времени. Кроме того, для избежания перегрузок ОУ вводят соответствующее распределение коэффициентов усиления по отдельным звеньям в каждой прямой (без обратной связи) ветви моделируемой системы.
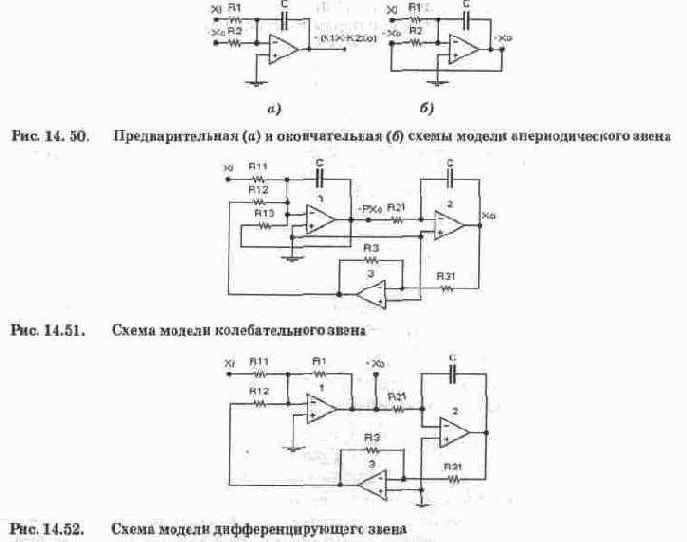
Колебательное звено [64]. Коэффициент передачи звена:

Модель звена показана на рис. 14.51. Она отличается от аналогичной модели на рис. 14.3 тем, что в ней совмещены функции сумматора и первого интегратора, что позволило уменьшить количество ОУ. Параметры компонентов модели определяются из следующих соотношений:

Дифференцирующее звено [64]. Коэффициент передачи звена:

Модель звена показана на рис. 14.52. Параметры ее компонентов выбираются из соотношений:

Интегоо-дифференцирующее звено Г641. Коэффициент передачи звена:

Для случая Т1>Т2 схема модели показана на рис. 14.53, а. Параметры ее компонентов определяются из соотношений:

Для случая Т1<Т2 модель звена показана на рис. 14.53, б. Ее параметры выбираются из соотношений:


Проведём испытания модели на рис. 14.53, б при следующих исходных данных: Т1=0,1 с, Т2=0,2 с, К=1, R1=1 МОм, R12=1 МОм, М,=1. Из условий (14.38) получаем значения остальных параметров: R11=2 МОм, R22=0,1 МОм, R21=0,2 МОм. При таких данных модель с необходимыми контрольно-измерительными приборами показана на рис. 14.54, а. Результаты ее испытания приведены на рис. 14.54, б — АЧХ, на рис. 14.54, в — осциллограммы сигналов, на рис. 14.54, г — ФЧХ. Для проверки результатов испытаний проведем необходимые расчеты, используя формулу (14.34). После подстановки в эту формулу и несложных преобразований получим выражения для АЧХ и ФЧХ в следующем виде:

При расчетах используем принятые для схемы на рис. 14.54, а значения Т1=0,1 с, Т2=0,2 с и полученные в результате моделирования значение угловой частоты 6,41 рад/с (см. рис. 14.54, б и г). После подстановки этих значений параметров в формулы (14.39) и (14.40) получим 0,739=-2,63 дБ, -19,4°, что практически совпадает с результатами моделирования (относительно фазы заметим, что сигнал на выходе модели инверсный — см. обозначение -Хо на рис. 14.53, а — 14.54, а и осциллограммы на рис. 14.54, в).
Генератор постоянного напряжения с независимым возбуждением. Коэффициент передачи генератора определяется выражением:


где Е(р) — ЭДС генератора; U(p) — напряжение на обмотке генератора; T=L/R — постоянная времени; L, R — индуктивность и активное сопротивление обмотки возбуждения; K=m/R — коэффициент передачи; m=E/I — крутизна линейной части характеристики холостого хода; Е — ЭДС генератора (в установившемся режиме); I — ток в обмотке возбуждения.
Из выражения (14.41) видно, что генератор постоянного напряжения с независимым возбуждением представляет собой апериодическое звено, т.е. в качестве его модели может быть использована схема на рис. 14.50, б. Для общего представле ния о порядке величин, входящих в выражение (14.41), приведем следующие данные [64]: m=08 В/А, R=65,5 Ом, L=27,5 Гн, К=1,65, Т=0,42 с.
Двигатель постоянного тока с независимым возбуждением. Передаточная характеристика двигателя по скорости определяется выражением [64]:

Из выражения (14.42) видно, что двигатель постоянного напряжения с независимым возбуждением представляет собой колебательное звено, т.е. в качестве его модели может быть использована схема на рис. 14.51.
Асинхронный двухфазный двигатель. Такой тип двигателя является наиболее распространенным (после двигателей постоянного тока) в системах управления. Его передаточный коэффициент без учета момента инерции нагрузки и внешнего скоростного трения определяется выражением:

Входящие в выражение (14.43) величины имеют такое же обозначение, что и в выражении (14.42).
С учетом нагрузки и внешнего трения (двигатель с редуктором) коэффициент передачи асинхронного двигателя определяется выражением:

Из выражений (14.43) и (14.44) видно, что асинхронный двигатель представляет собой апериодическое звено, т.е. в качестве его модели может быть использована схема на рис. 14.50, б.
Электромашинный усилитель с поперечным полем. Электромашинный усилитель (ЭМУ) представляет собой устройство, состоящее из генератора постоянного тока с одной или несколькими обмотками возбуждения (управления) и приводного двигателя. Приводной двигатель предназначен для вращения ротора генератора с некоторой постоянной скоростью и обычно представляет собой однофазный или трехфазный асинхронный нерегулируемый электродвигатель с корот-козамкнутым якорем. ЭМУ применяются в схемах следящего привода совместно с двигателями постоянного тока мощностью от нескольких десятков ватт до нескольких киловатт.
Статические и динамические свойства ЭМУ определяются совокупностью следующих характеристик:
Характеристика холостого хода — определяет зависимость выходной ЭДС ЭМУ от величины тока управления в установившемся режиме. Характеристика холостого хода является линейной функцией при условии, что магнитная система ЭМУ не насыщена.
Внешняя (нагрузочная) характеристика — определяет функциональную зависимость выходного напряжения от тока нагрузки в установившемся режиме.
Коэффициент усиления напряжения — определяется обычным образом и колеблется в пределах от нескольких единиц до нескольких десятков.
Коэффициент усиления мощности — пропорционален скорости вращения его якоря, колеблется в пределах от десятков до нескольких тысяч.
Добротность ЭМУ — характеризуется коэффициентом добротности, представляющим собой отношение коэффициента усиления по мощности к постоянной времени усилителя.
В зависимости от конструкции и способа возбуждения ЭМУ подразделяются на следующие типы:
1) с независимым возбуждением;
2) со смешанным возбуждением;
3) со специальной ориентацией магнитных потоков.
ЭМУ с независимым возбуждением представляет собой обычный генератор постоянного тока, обмотка возбуждения которого питается от регулируемого источника напряжения. Выходное напряжение ЭМУ с независимым возбуждением с достаточной степенью точности линейно зависит от скорости вращения его ротора. ЭМУ с независимым возбуждением дает возможность управлять значительными мощностями нагрузки при незначительных затратах мощности в обмотке управления. Коэффициент усиления по мощности для некоторых типов ЭМУ с независимым возбуждением может достигать значений 100 и более. Постоянная времени обмоток возбуждения обычно составляет десятые доли секунды.
ЭМУ со смешанным возбуждением представляет собой генератор постоянного тока, работающий в режиме самовозбуждения. ЭМУ со смешанным возбуждением отличаются от усилителей с независимым возбуждением тем, что необходимая для создания магнитного потока возбуждения мощность почти целиком поступает с выхода по цепи положительной обратной связи. Вследствие этого результирующий коэффициент усиления системы может быть достаточно большим.
Для третьего типа ЭМУ классификационными признаками являются число ступеней усиления и ориентация управляющего магнитного потока второй (и третьей) ступени усиления по отношению к управляющему магнитному потоку первой ступени усиления. По числу ступеней усиления ЭМУ подразделяются на одно-, двух-и трехступенчатые. По ориентации управляющего магнитного потока второй ступени двух- и трехступенчатые ЭМУ подразделяются на ЭМУ с поперечным, с продольным полем и с продольно-поперечным полем.
ЭМУ с поперечным полем представляет собой специальный генератор постоянного тока с якорем, выполненным по типу якорей обычных машин постоянного тока, но с дополнительной парой поперечных короткозамкнутых щеток (см. рис. 14.55). Благодаря такой конструкции ЭМУ с поперечным полем требует для возбуждения мощность, в десятки раз меньшую, чем соответствующая мощность возбуждения обычных генераторов. На статоре ЭМУ расположены одна или не- . сколько обмоток управления (на рис. 14.55 показана только одна обмотка Wy), обмотка дополнительных полюсов и компенсационная обмотка.
В ЭМУ с поперечным полем магнитный поток управления второй ступенью усиления расположен перпендикулярно к магнитному потоку управления первой ступенью. Так как принято считать, что магнитный поток первой ступени, создаваемый входной управляющей обмоткой, направлен по продольной оси ЭМУ (перпендикулярно рис. 14.55), то магнитный поток управления второй ступени направлен по поперечной оси ЭМУ. Поэтому этот класс двухступенчатых ЭМУ и получил название ЭМУ с поперечным полем.
При подаче на обмотку управления Wy сигнала управления в ЭМУ возникает продольный магнитный поток управления. В витках вращающегося с постоянной скоростью ротора (якоря) наводится ЭДС, при этом наибольшего значения она достигает в витках, расположенных в продольной плоскости ЭМУ. Напряжение этой ЭДС снимается поперечными щетками 1 (см. рис. 14.55). Поскольку они закорочены и сопротивление цепи мало, то в цепи протекает достаточно большой ток, что приводит к формированию значительного по величине поперечного магнитного потока. Этот процесс называется реакцией якоря по поперечной цепи (первая ступень усиления ЭМУ). Под действием усиленного таким образом магнитного потока в витках вращающегося якоря ЭМУ наводится ЭДС, максимальная величина которой имеет место в витках, расположенных в плоскости этого потока, т.е. в поперечной плоскости ЭМУ. Напряжение этой ЭДС, снимаемое продольными щетками 2, является выходным сигналом ЭМУ (вторая ступень усиления). Поскольку при подключенной нагрузке по поперечным виткам якоря ЭМУ протекает ток, то под действием этого тока в ЭМУ создается магнитный поток, направленный по продольной оси навстречу потоку. Это так называемая реакция якоря ЭМУ по продольной оси. Таким образом, в продольной оси ЭМУ будет действовать некоторый результирующий магнитный поток, который является функцией не только управляющего напряжения в обмотке Wy, но и параметров нагрузки. Для уменьшения противодействующего магнитного потока в статоре ЭМУ используется компенсационная обмотка, с помощью которой достигается компенсация продольной реакции якоря.
Рис. 14.55. Упрощенная схема ЭМУ с поперечным полем
Динамика работы ЭМУ описывается достаточно сложными и громоздкими выражениями [65]. На практике же при проведении расчетов систем управления используются упрощенные выражения. Для коэффициента передачи двухкаскадного ЭМУ с поперечным полем оно имеет следующий вид:

где Е(р), Uy(p) — ЭДС якоря по продольной оси и напряжение на управляющей обмотке; K=NyMe/Ry —коэффициент усиления ЭМУ по напряжению; Ny — число витков управляющей обмотки (3200); Мe — угловой коэффициент холостого хода ЭМУ, определяемый отношением ЭДС якоря по продольной оси к магнитодвижущей силе, создаваемой обмоткой управления (4,2 В/А-В); Ry — активное сопротивление обмотки управления (2 кОм); Tl=Ly/Ry — постоянная времени обмотки управления; Ly — индуктивность обмотки управления (80 Гн); T2=Lq/Rq — постоянная времени поперечной цепи якоря ЭМУ; Lq, Rq — индуктивность (0,16 Гн) и активное сопротивление (1,23 Ом) поперечной цепи якоря.
Из выражения (14.45) видно, что ЭМУ с поперечным полем представляет собой колебательное звено, т.е. в качестве его модели может быть использована схема на рис. 14.51.
Дифференцирующий трансформатор используется в системах управления в качестве согласующего и корректирующего элемента. Его схема приведена на рис. 14.56, на котором буквой М обозначен коэффициент взаимной индуктивности обмоток. Типичные значения параметров трансформатора [64]: число витков, индуктивность и активное сопротивление обмоток N1=420, L1=l,15 Гн, R1=24 Ом — для первичной и М2=2680, L2=47 Гн, Р2=2200 Ом — для вторичной; индуктивность и сопротивление нагрузки Lн=110 Гн, Rн=2200 Ом.

Рис. 14.56. Схема дифференцирующего трансформатора
При работе на индуктивную нагрузку (например ЭМУ) коэффициент передачи трансформатора определяется выражением:

где Io(p), Ui(p) — ток вторичной и напряжение первичной обмоток, K=n/Ro, n=N2/N1 — коэффициент трансформации, Ro=R2+Rн — суммарное сопротивление вторичной обмотки и нагрузки, Tl=L1/(R1+R1) — постоянная времени первичной обмотки, R, — внутреннее сопротивление источника входного сигнала, T2=(L2+Lн)/Ro — постоянная времени вторичной обмотки.
Из выражения видно, что в качестве модели дифференцирующего трансформатора могут быть использованы последовательно включенные модели дифференцирующего и апериодического звена.
Если трансформатор работает на высокоомную нагрузку (например, усилитель с высоким входным сопротивлением), то постоянной времени Т2 в формуле (14.46) можно пренебречь и в этом случае дифференцирующий трансформатор может моделироваться дифференцирующим звеном.
Тахогенератор является электромеханическим преобразователем скорости вращения в электрический сигнал постоянного или переменного тока. По существу это обычные электрические генераторы малой мощности. Коэффициент передачи тахогенератора постоянного тока определяется выражением [65]:

Как видно из выражения (14.47), тахометр является идеальным дифференцирующим звеном.
Сельсины. Индукционная синхронная передача на сельсинах в простейшем случае состоит из двух электрически связанных между собой сельсинов одинаковой конструкции. Сельсин как элемент синхронной передачи представляет собой электрическую машину переменного тока с однофазной обмоткой возбуждения и трехфазной обмоткой синхронизации.
В зависимости от выполняемых функций в схемах синхронной передачи угла и вращения сельсины разделяются на сельсины-датчики, сельсины-приемники, дифференциальные сельсины-датчики и приемники, сельсины-трансформаторы. Сельсин-датчик используется в качестве элемента, воспроизводящего угловые перемещения командного вала и передающего их сельсину-приемнику. Сельсин-приемник воспроизводит закон движения, заданный сельсином-датчиком, в виде углового перемещения ротора, пропорционального угловому перемещению ротора сельсина-датчика. С помощью дифференциального сельсина-датчика (или приемника) производится алгебраическое суммирование величин угловых перемещений. Сельсин-трансформатор воспроизводит закон движения, заданный сельсином-датчиком, в виде электрического напряжения, пропорционального угловым перемещениям ротора сельсина-датчика.
В системах автоматического регулирования сельсины обычно используются в двух основных режимах работы индукционных синхроннных передач: индикаторном и трансформаторном (измерительном).
При индикаторной синхронной передаче обмотку синхронизации сельсина-датчика соединяют с обмоткой синхронизации сельсина-приемника. На обмотки возбуждения сельсинов подается напряжение питания. Если угловые положения роторов датчика и приемника неодинаковы, то под действием возникающих синхронизирующих моментов они приходят в согласованное положение. При принудительном вращении ротора сельсина-датчика вал ротора сельсина-приемника вращается с той же скоростью, что и вал ротора датчика, т.е. следит за угловым положением ротора датчика.
При трансформаторной (измерительной) синхронной передаче обмотку синхронизации сельсина-датчика соединяют с обмоткой синхронизации сельсина-трансформатора. Обмотку возбуждения сельсина-трансформатора включают на нагрузку. Напряжение питания подается на обмотку возбуждения сельсина-датчика. При повороте ротора датчика на некоторый угол в однофазной обмотке сельсина-трансформатора наводится ЭДС, амплитуда которой пропорциональна углу рассогласования между угловыми положениями роторов сельсина-датчика и сельсина-трансформатора, а фаза зависит от направления или знака рассогласования.
Основными характеристиками сельсинов являются: статический и динамический синхронизирующие моменты, крутизна кривой статического синхронизирующего момента, точность синхронной передачи, влияние скорости и ускорения на погрешности схемы, коэффициент добротности, устойчивость положения осей системы, влияние колебаний напряжения, частоты питающей сети и длины соединительной линии на погрешность системы, влияние количества приемников, работающих одновременно от одного датчика.
Основной характеристикой дистанционной передачи является зависимость статического синхронизирующего момента от угла рассогласования между роторами датчика и приемника в положении покоя (все характеристики передачи обычно определяют по отношению к приемнику, поскольку роторы сельсинов-датчиков перемещаются принудительно).
Крутизна кривой статического синхронизирующего момента определяет удельный синхронизирующий момент, развиваемый на валу приемника при его рассогласовании с датчиком на один градус.
Динамический синхронизирующий момент — это момент, развиваемый системой на валу приемника в режиме вращения.
Статическая точность передачи характеризуется величиной статической ошибки, определяемой углом рассогласования между осями датчика и приемника в состоянии равновесия (при отсутствии вращения). Величина статической ошибки зависит от нагрузки или внешнего момента на валу приемника, а также от собственной погрешности сельсинов. В зависимости от величины собственной погрешности сельсины различают по классам точности (от 0,25' до 1° для датчиков и от 0,75° до 2,5° для приемников). Величина, обратная статической ошибке, характеризует добротность синхронной передачи.
Динамическая точность характеризуется величиной динамической ошибки, определяемой углом рассогласования между осями сельсина-датчика и сельсина-приемника в режиме вращения. Динамические ошибки также измеряются в градусах.
Устойчивость положения осей системы в положении равновесия характеризует способность роторов сельсинов-приемников сохранять неизменным заданное положение при внешних воздействиях.
Динамика сельсинной передачи в большинстве практических случаев может быть описана системой первого порядка, т.е. в качестве ее модели может быть использована модель апериодического звена.
Вращающийся трансформатор (ВТ) представляет собой устройство, в конструктивном отношении имеющее много общего с асинхронной машиной с неявно выраженными полюсами. Принцип действия ВТ основан на использовании его свойства изменять взаимоиндуктивность между обмотками статора и ротора (при повороте последнего) по закону, близкому к синусоидальному. На статоре и роторе ВТ обычно размещаются по две распределенные обмотки, магнитные оси которых взаимно перпендикулярны. Ротор поворачиваться относительно статора на некоторый произвольный угол, максимальная величина которого зависит от конструкции ВТ.
Одна из обмоток ВТ (обычно статорная) питается однофазным переменным током и называется первичной обмоткой, или обмоткой возбуждения. Схема включения остальных обмоток определяется заданной зависимостью, воспроизводимой с помощью ВТ. Выходная величина, пропорциональная воспроизводимой функции, снимается в виде электрического напряжения переменного тока со вторичной обмотки. Вторичная обмотка обычно располагается на роторе.
ВТ в различных модификациях применяются в качестве функциональных преобразователей, а также как чувствительные элементы, фиксирующие отклонение системы от некоторого определенного положения.
По характеру токосъема ВТ делятся на контактные и бесконтактные. Контактные ВТ конструируются таким образом, что токосъем с обмотки ротора может быть осуществлен либо с помощью колец и щеток, либо с помощью спиральных пружин. В последнем случае угол поворота ротора ограничивается максимальным углом закручивания спиральных пружин. Токосъем в конструкциях бесконтактных ВТ осуществляется за счет использования индуктивной связи статорных и роторных цепей.
Параметры ВТ определяются сопротивлением холостого хода, коэффициентом трансформации и материалом магнитопровода.
Сопротивление холостого хода измеряется на рабочей частоте при разомкнутой вторичной цепи. Численные значения сопротивления холостого хода ВТ колеблются в пределах 250...4500 ом.
Коэффициент трансформации определяется отношением максимального вторичного напряжения к напряжению возбуждения. Численные значения коэффициентов трансформации отдельных образцов ВТ могут изменяться в пределах от 0,1 до 1,0.
В качестве материала магнитопроводов ВТ применяется железо или пермал-лой. Магнитопровод из железа обычно используется в тех случаях, когда ВТ работает непосредственно от сети или иного мощного источника питания; в многокаскадной схеме или при работе от маломощного источника питания, как правило, используют вращающиеся трансформаторы с магнитопроводом из пермаллоя.
Точность ВТ определяется максимальной погрешностью воспроизведения заданной функции. В зависимости от величины этой погрешности вращающиеся трансформаторы делятся на группы, соответствующие трем классам точности: первый класс — с погрешностью до 0,1%; второй класс — от 0,1 до 0,25%; третий класс — более 0,25%
В качестве модели ВТ может быть использована модель дифференцирующего или апериодического звена.
Таким образом, в большинстве случаев элементы систем автоматического регулирования могут быть представлены в виде рассмотренных в начале раздела четырех типов звеньев.
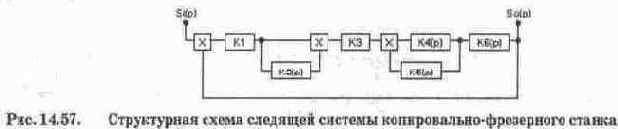
Перейдем теперь к структурному моделированию систем управления. В качестве примера рассмотрим процесс моделирования следящей системы копировально-фрезерного станка [64], структурная схема которой показана на рис. 14.57. Для этой системы необходимо провести исследование переходных процессов при входном воздействии Si(p)=l. В состав системы входят (см. рис. 14.57) преобразующее устройство с коэффициентом передачи К1=10 В/мм; дифференцирующий трансформатор с коэффициентом передачи К2(р)=рК2/(1+рТ2), где К2=0,104 с, Т2=0,0303 с (схема модели на рис. 14.52); электронный усилитель с коэффициентом передачи К3=6,3;
ЭМУ с коэффициентом передачи К4(р)=К4/(1+рТ4), где К4=35,6, Т4=0,0616 с — постоянная времени поперечной цепи якоря (схема модели на рис. 14.50, б); звено обратной связи по скорости с коэффициентом передачи К5(р)=рК5/(1+рТ5), где К5=0,027 с, Т5=0,134 с — электромеханическая постоянная двигателя (схема модели на рис. 14.52); электродвигатель с редуктором с коэффициентом передачи К6(р)=рК6/(1+рТ5), где К6=0,053 мм/В-с — передаточный коэффициент электродвигателя по скорости (схема модели состоит из последовательно включенных модели апериодического звена и интегратора); масштаб по времени Mt=20. Дополнительным условием является введение ограничения на коэффициент усиления ОУ с ООС — не более 10 (такие ограничения характерны для реальных моделирующих установок).
Рабочая модель (схема набора) рассматриваемой системы показана на рис. 14.58. Входное единичное воздействие в схеме модели имитируется источником постоянного напряжения Ui=l В, преобразующее устройство — сумматором на ОУ 1, дифференцирующий трансформатор — дифференцирующим звеном на ОУ 2, 3 и 4 (см. рис. 14.52), электронный усилитель — сумматором на ОУ 5, ЭМУ — апериодическим звеном на ОУ 6 (см. рис. 14.50, б), звено гибкой обратной связи — дифференцирующим звеном на ОУ 7, 8 и 9 (см. рис. 14.52), электродвигатель с редуктором — апериодическим звеном на ОУ 10 и интегратором на ОУ 11. Таким образом, модель составлена в соответствии со структурной схемой из моделей типовых звеньев.
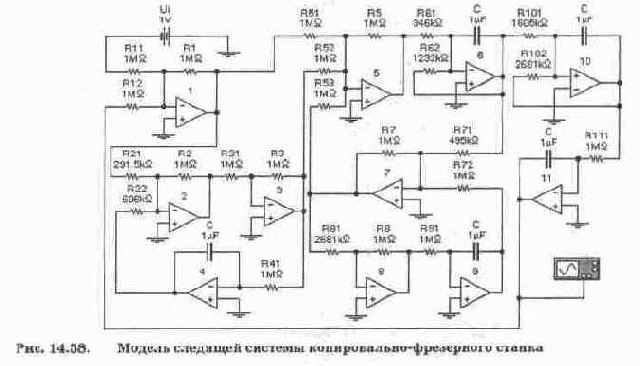
Проведем предварительный выбор передаточных коэффициентов каждого компонента модели, отмечая их штрихом и следуя методике, изложенной в [64], и системе обозначений, принятой в [29]. Для преобразовательного звена задаемся K11'=R1/R12=1, K12'=R1/R12=1 (коэффициент передачи звена К1 будет учтен при выборе параметров интегратора на ОУ 11). Для дифференцирующего трансформатора задаемся КЗ1'=1, на основании (14.35) находим K21'=R2/R21=K2/T2= =0,104/0,0303=3,43, K22'.K41'=(R2/R22)(l/R41-C)=l/MtT2=l/20-0,0303=l,65, откуда, задавшись K41'=1/R41-C=1, получим K22'=R2/R22=1,65. Для сумматора на ОУ 5 задаемся K51'=R5/R51=1, K52'=R5/R52=1, K53'=R5/R53=1 (коэффициент усиления звена КЗ будет учтен при выборе параметров интегратора на ОУ 11). Для ЭМУ на основании (14.31) рассчитываем К61'=1/Р61-С=К4/МtТ4= =35,6/20-0,0616=28,9, K62'=1/R62-C=1/M..T4=1/20-0,0616=0,812. Для элемента обратной связи по скорости на основании (14.34) рассчитываем K71'=R7/R71= =К5/Т5=0,027/0,134=0,202, K72'-K81'.K91'=(R7/R72)(R8/R81)(1/R91.C)=1/M,.T5= =1/20-0,134=0,373, откуда, задавшись K72'=(R7/R72)=1, K91'=1/R91-C=1, получим K81'=R8/R81=0,373. Поскольку электродвигатель с редуктором представлен апериодическим звеном на ОУ 10 и интегратором на ОУ 11, то его коэффициент передачи К6=0,053 разобьем на два: 1 — для апериодического звена и 0,053 — для интегратора. В таком случае для апериодического звена на ОУ 10 на основании (14.31) получаем К101'=1/Р101-С=1/М,-Т5=1/20.0,134=0,373, К102'=1/К102-С=1/М».Т5= =1/20-0,134=0,373. Для интегратора на ОУ 11с учетом принятых выше условий коэффициент передачи K111'=1/R111-С=К1.КЗ-К6/М.=10-6,3(0,053)/20=0,167.
Поскольку коэффициент передачи К61' получился больше оговоренного в условиях задачи, то уменьшим его в 10 раз, при этом для сохранения прежнего значения петлевого усиления (в петле обратной связи) необходимо увеличить в 10 раз коэффициент передачи К7Г. Кроме того, для сохранения произведения К1-КЗ-К4-К6 необходимо увеличить в 10 раз и значение коэффициента Kill'. Последнее изменение связано с обеспечением удобства набора на реальной моделирующей установке — выбираем коэффициент передачи К111'=1, при этом коэффициент К10Г необходимо увеличить в 1.67 раза. После внесения указанных изменений коэффициенты передачи модели на рис. 14.57 принимают следующие окончательные значения, на основании которых и были выбраны параметры ее компонентов:

Результаты моделирования рассматриваемой системы при входном воздействии в виде единичного потенциального скачка представлены на рис. 14.59, а осциллограммами переходного процесса. Длительность переходного процесса с учетом принятого масштаба составляет (см. результаты измерения в индикаторных окнах на рис. 14.59, а) Т2/М,=10,08/20=0,5 с, количество колебаний — 1, что полностью совпадает с результатами расчета и моделирования на моделирующей установке МН-7, полученными в работе [64]. Величина перерегулирования, как видно из строки VA1 индикаторного окна, составляет около 0,42 В, т.е. 42%, что на 8% меньше полученного в [64]. Результаты осциллографических измерений дополним фазовой траекторией модели, показанной на рис. 14.59, б. Как показали измерения, время от начала моделирования до прихода изображающей точки к установившемуся значению выходной величины соответствует времени переходного процесса. Кроме того, с помощью фазовой траектории можно определить (см. рис. 14.59, б) величину перерегулирования и число колебаний.
Схема на рис. 14.58 может быть использована также для исследования нели-нейностей в автоматических системах. Ее схема для такого применения показана на рис. 14.60. В ней изменены коэффициенты передачи К21, К62, К81, К101, К102 и Kill, что позволило повысить колебательность и уменьшить масштаб времени для обеспечения возможности наблюдения переходного процесса при ограниченной длительности развертки (1 с/дел). Схема модели дополнена переключателем Z, с помощью которого в цепь обратной связи ОУ 1 можно включить ограничительную цепь из параллельно включенных диодов VD1, VD2 и тем самым имитировать нелинейность типа насыщения ОУ (ограничения по координатам).
Осциллограмма переходных процессов при входном воздействии в виде потенциального скачка в 10 В (Ui = 10 В) в положении ключа Z, показанном на рис. 14.60 (цепь ограничения отключена), приведена на рис. 14.61, а, а при замкнутом ключе Z (цепь ограничения включена) — на рис. 14.61, б. Из сравнения осциллограмм на рис. 14.61 видно, что введение нелинейности в систему управления существенно влияет на переходные процессы — уменьшается перерегулирование, сокращается время переходных процессов и уменьшается колебательность (увеличивается демпфирование).


Контрольные вопросы и задания
1. Используя условия (14.37) и схему на рис. 14.53, а, составьте рабочую модель интегро- дифференцирующего звена первого рода, проведите ее испытание путем сравнения результатов моделирования с результатами расчетов по формулам (14.38) и (14.39).
2. Как следует из выражения (13.34), схему модели дифференцирующего звена можно было составить из последовательно включенных дифференциатора и апериодического звена. Почему авторы работы [64] не пошли по такому пути?
3. Используя формулы (14.27) и (14.31) — (14.35), составьте выражения для АЧХ, ФЧХ и рабочие модели апериодического, колебательного и дифференцирующего звеньев. Проведите испытания этих моделей путем сопоставления результатов моделирования с результатами расчета по полученным формулам для АЧХ и ФЧХ (по аналогии с рассмотренным процессом испытания модели на рис. 14.54, а).
4. Каким образом можно моделировать генератор и двигатель постоянного тока?
5. Приведите схему модели асинхронного двигателя переменного тока.
6. Как устроен ЭМУ с поперечным полем? Можно ли использовать электродвигатель постоянного тока в качестве ЭМУ?
7. Для каких целей используются сельсины и вращающиеся трансформаторы?
8. Назовите основные характеристики сельсинов и вращающихся трансформаторов.
9. Для каких целей используются дифференцирующие трансформаторы? Назовите элементы схемы на рис. 14.58, имитирующие дифференцирующий трансформатор.
10. Проведите расчеты переходного процесса следящей системы на рис. 14.57, если известно, что при единичном входном сигнале ее выходное напряжение определяется выражением [64]: So(t)=l+l,12exp(-14,75t)+2,llexp(-7,6t)-cos(12,9t+3,37)--0,025exp(-143t). Результате расчета сравните с результатами моделирования.
11. В какую точку схемы на рис. 14.58 необходимо подключить вход канала В осциллографа, чтобы получить фазовую траекторию на рис. 14.59, б.
12. Отключите в модели на рис. 14.58 элементы, имитирующие дифференцирующий трансформатор, и проведите моделирование. Полученные результаты сравните с результатами на рис. 14.59.
13. В модели на рис. 14.58 отключите элементы, имитирующие цепь обратной связи по скорости, и проведите моделирование. Полученные результаты сравните с результатами на рис. 14.59.
14. Исследуйте зависимость перерегулирования, времени переходных процесов и колебательности (числа колебаний за время переходных процессов) от входного сигнала (воздействия) Ui в диапазоне от 0,5 до 15 В в модели на рис. 14.60. Используйте для этой цели как осциллограммы переходных процессов, так и фазовые траектории.
Транзисторные ключи
8.2. Транзисторные ключи
Транзисторные ключи выполняются на биполярных или полевых транзисторах. В свою очередь ключи на полевых транзисторах делятся на МДП-ключи и ключи на полевых транзисторах с управляющим р—га-переходом.
Ключи на биполярных транзисторах делятся на насыщенные и ненасыщенные. При анализе транзисторных ключей рассматривают два режима — статический и динамический.
В статическом режиме анализируется закрытое и открытое состояние ключа. В закрытом состоянии ключа на его входе низкий уровень напряжения (сигнал логического нуля), при котором оба перехода смещены в обратном направлении (режим отсечки). При этом коллекторный ток определяется только тепловым током.
При использовании ключа в логических интегральных схемах, в которых обычно применяются транзисторы типа п—р—п, запирающее напряжение положительно и в этом случае имеет место только "условное" запирание транзистора, когда его эмиттерный переход смещен в прямом направлении; однако уровень действующего на его входе напряжения меньше порогового уровня, равного около 0,6 В, и коллекторный ток транзистора относительно мал, т.е. составляет лишь единицы процентов от тока открытого транзистора.
В открытом состоянии ключа на его входе высокий уровень напряжения (сигнал логической единицы). При этом возможны два режима работы открытого транзистора — работа в линейной области выходной характеристики или в области насыщения.
В активной области эмиттерный переход смещен в прямом направлении, а коллекторный — в обратном, при этом для кремниевых транзисторов напряжение на эмиттерном переходе составляет около 0,7 В и коллекторный ток практически линейно зависит от тока базы.
В области Насыщения оба перехода транзистора смещены в прямом направлении и изменение тока базы не приводит к изменению коллекторного тока. Для кремниевых транзисторов ИС напряжение на смещенном в прямом направлении р—n-переходе составляет около 0,8 В, для германиевых оно равно 0,2...0,4 В.
Насыщение ключа достигается увеличением тока базы. Однако при некотором его значении, которое называется базовым током насыщения „, дальнейший рост тока базы практически не приводит к росту коллекторного тока насыщения , при этом напряжение на коллекторе (с учетом коллекторной нагрузки) составляет несколько десятков или сотен милливольт (в ИС около 0,1...0,2 В). Одной из важных характеристик ключа в режиме насыщения является параметр 8 — коэффициент насыщения, равный отношению 1кн/1бн- На границе насыщения 8=1. С увеличением коэффициента насыщения ключа увеличивается его нагрузочная способность, уменьшается влияние различных дестабилизирующих факторов на выходные параметры ключа, но ухудшается быстродействие. Поэтому коэффициент насыщения выбирается из компромиссных соображений, исходя из условий конкретной задачи.
Быстродействие ключевого элемента определяется максимально допустимой частотой следования входных переключающих сигналов. Очевидно, что оно зависит от общей длительности переходного процесса, определяемой инерционностью транзистора и влиянием паразитных параметров (например, перезарядом паразитных емкостей в процессе переключения). Часто для характеристики быстродействия ключевого (логического) элемента используется среднее время задержки сигнала при его передаче через элемент. При конечной длительности фронта входного сигнла задержки включения и выключения отсчитываются на 10- или 50-процентных уровнях входного и выходного сигналов.
Взаимодействие ключей друг с другом осуществляется через элементы связи. Если уровень напряжения на выходе первого ключа высокий, то на входе другого ключа должен быть уровень, при котором второй ключ открывается и работает в заданном режиме, и, наоборот, если первый ключ открыт, то на входе второго ключа должен быть достаточно низкий уровень, при котором второй ключ закрыт. Цепь связи оказывает существенное влияние на переходные процессы, возникающие при переключении, и, следовательно, на быстродействие ключей. Используемые в ключевых устройствах элементы связи показаны на рис. 8.10.
Ключевой каскад на рис. 8.10, а представляет собой каскад по схеме с ОЭ, на входе которого включен резистор Rb, обеспечивающий при заданном входном напряжении Ui требуемый ток насыщения базы

где Ub.=(0,7...0,8) В — напряжение база-эмиттер открытого транзистора (здесь и далее имеются в виду кремниевые транзисторы); S=1,5...2 — коэффициент насыщения; В — коэффициент усиления транзистора по току; и,н=(0,1...0,2) В — напряжение на коллекторе открытого транзистора; Ucc — напряжение питания.

Выберем в качестве примера ключевой каскад, используемый в микросхемах транзисторно-транзисторной логики (ТТЛ). Для них Ucc=5 В, нормируемое минимальное входное напряжение логической единицы Ui=2,4 В. Следовательно, при наихудшем сочетании паоаметоов из (8.6} получаем тпебуемое сопоотивление резистора:

Когда с предыдущего каскада поступает сигнал логического нуля Ui=0,2 В, транзистор закрыт не полностью. Кроме того, к указанному значению входного напряжения добавляется и падение напряжения на сопротивлении в цепи базы от коллекторного теплового тока. Для компенсации этих составляющих сигнала логического нуля и обеспечения при этом режима отсечки транзистора в классической схеме ключевого каскада предусматривается источник компенсирующего тока, образованного резистором Rbz и источником напряжения -Ub.
Показанный на рис. 8.10, а конденсатор Си называется ускоряющим, он предназначен для повышения быстродействия ключа. Благодаря ему увеличивается отпирающий базовый ток в момент появления сигнала логической единицы и ускоряется процесс запирания транзистора при сигнале логического нуля, поскольку в этом случае ускоряющий конденсатор будет создавать на базе запирающее напряжение отрицательной полярности.
Второй способ повышения быстродействия транзисторного ключа заключается в применении отрицательной обратной связи (рис. 8.10, б). Сущность способа заключается в предотвращении насыщения транзистора за счет использования в цепи отрицательной обратной связи диода VD. Пока напряжение база-коллектор больше падения напряжения на сопротивлении Ro, этот диод заперт, обратная связь отсутствует. При увеличении входного сигнала (и соответственно входного тока) увеличивается и ток коллектора. При достаточно большом входном сигнале напряжение база-коллектор становится равным падейию напряжения на сопротивлении резистора Ro, диод VD отпирается и начинает действовать отрицательная обратная связь. Теперь рост базового тока мало влияет на режим транзистора, так как значительная часть входного тока протекает в этом случае непосредственно через диод и транзистор не переходит в режим насыщения.
Рассмотренный способ применительно к интегральным микросхемам реализуется с помощью диодов Шотки, подключаемых параллельно переходу база-коллектор транзистора, при этом такая комбинация в интегральном исполнении составляет единую структуру — транзистор Шотки.
Существенного повышения быстродействия ключа на рис. 8.10, б можно добиться только при использовании диодов, имеющих малое время восстановления. Если применять низкочастотные диоды, в которых велико время рассасывания заряда, накопленного в базе, то эффект от введения нелинейной обратной связи будет незначителен. В этом случае диоды Шотки незаменимы. Они имеют малое время восстановления (не более 0,1 нс), низкое напряжение отпирания (около 0,25 В) и малое сопротивление в открытом состоянии (около 10 Ом). При применении диодов Шотки отпадает необходимость во введении дополнительного напряжения смещения. Это обусловлено тем, что диод отпирается при более низком напряжении между коллектором и базой, когда транзистор еще находится на границе активного режима.
Недостатки ненасыщенного транзисторного ключа сводятся к следующему:
1. Падение напряжения на открытом ключе больше, чем в насыщенном режиме (порядка 0,5 В).
2. Ухудшается помехоустойчивость, что объясняется более высоким входным сопротивлением в открытом состоянии, в результате чего различные помехи, например, скачки напряжения питания, приводят к изменениям напряжения на транзисторе.
3. Температурная стабильность ненасыщенного ключа значительно хуже, чем у насыщенного.
Рассмотрим простейший транзисторный ключ (рис. 8.11). Напряжение питания ключа выбрано небольшим (0.5 В), чтобы можно было продемонстрировать на экране осциллографа падение напряжения на открытом ключе. На рис. 8.11 представлена также лицевая панель функционального генератора с установленными режимами его работы.
Результаты моделирования схемы на рис. 8.13 приведены на рис. 8.14, откуда видно, что падение напряжения на открытом ключе при токе коллектора около 0,5 мА составляет 40 мВ (при напряжении на базе около 0,8 В), т.е. является достаточно большим, что является серьезным ограничением при использовании таких ключей в коммутаторах аналоговых сигналов.

Рис. 8.11. Простейший ключ на биполярном транзисторе

Ключи на полевых транзисторах с управляющим р—га-переходом применяют в различных коммутаторах аналоговых сигналов. Их существенными преимуществами перед ключами на биполярных транзисторах являются:
1) малое остаточное напряжение на ключе в проводящем состоянии;
2) высокое сопротивление в непроводящем состоянии и, как следствие, малый ток, протекающий через закрытый ключ;
3) малая потребляемая мощность от источника управляющего напряжения;
4) достаточно хорошая развязка между источником управления и источником коммутируемого сигнала;
5) возможность коммутации электрических сигналов низкого уровня (порядка микровольт).
Базовые схемы ключей на полевых транзисторах с управляющим р—п-переходом показаны на рис. 8.13 [48]. Коммутируемый сигнал подается на вход Ui и снимается с выхода Uo (Rn — сопротивление нагрузки). Сигнал управления подается на вход Uu. Для запирания ключа на затвор транзистора подается напряжение, которое должно превышать напряжение стока и истока на величину, большую напряжения отсечки на 2...3 В, но не превышающую для конкретного транзистора предельно допустимых значений.
В закрытом состоянии сопротивление ключей достаточно велико (более 10" Ом). Оно определяется не только сопротивлением канала, но и током обратно смещенного р—п-перехода затвор-сток. В закрытом состоянии емкость между управляющим электродом и цепью переключаемого сигнала составляет 3...30 пФ.
В открытом состоянии ключа напряжение на управляющем электроде близко к нулю и зависит от значения коммутируемого напряжения Ui и сопротивления нагрузки Rn. Это обусловлено тем, что при увеличении напряжения на истоке транзистора и неизменном потенциале затвора напряжение затвор-исток отлично от нуля и транзистор частично заперт, при этом сопротивление сток-исток увеличится и падение напряжения в канале сток-исток возрастет. Для ключа, работающего в режиме прерывателя, когда напряжение Ui может меняться в широких пределах, это является существенным недостатком. Поэтому в таких случаях необходимо применять схемы, обеспечивающие автоматическую стабилизацию напряжения между затвором и каналом. На схемах рис. 8.13 эту роль выполняет последовательно включенный в цепь затвора диод VD, который для запирающего напряжения включен в прямом направлении. Если напряжение управления выбрать больше максимально возможного значения коммутируемого напряжения, то при подаче открывающего напряжения р—га-переход затвора открывается, а диод VD закрывается. В этом случае при изменениях коммутируемого напряжения р—n-переход останется открытым и сопротивление его канала останется неизменным. Для этой же цели в схеме на рис. 8.13, б между истоком и входом ключа дополнительно включается высокоом-ный резистор R. Используемый в схеме на рис. 8.13, а конденсатор С предназначен для ускорения процесса перезарядки емкостей затвор-исток и затвор-сток.

Схема для исследования ключа на полевом транзисторе показана на рис. 8.14, а. Кроме собственно ключа в схеме используется функциональный генератор в качестве источника коммутируемого сигнала с внутренним сопротивлением Ri, осциллограф для контроля сигнала на входе (канал А) и выходе (канал В) ключа, вольтметр для измерения сигнала управления Uu на выходе цепи управления, состоящей из ключа на биполярном транзисторе VT2 и переключателя Z, управляемого одноименной клавишей клавиатуры. В положении переключателя, показанном на рис. 8.14, а, на базу транзистора VT2 подается через резистор R1 сигнал условной логической единицы от источника коллекторного питания Ucc. При этом транзистор VT2 открыт и на его выходе формируется низкий потенциал (73,7 мВ) сигнала управления, при котором основной ключ на транзисторе VT1 должен быть открыт, что и подтверждается результатами осциллографических измерений на рис. 8.14,6.
На экране осциллографа (рис. 8.14, б) зафиксированы двухполярные входной (А) и выходной (В) сигналы. То, что сигналы двухполярные, подтверждается выбором режима работы функционального генератора (установка OFFSET — наличие постоянной составляющей) и осциллографа, где установки Y POS показывают, что осевые линии смещены на 2 деления вверх для канала А и на 2 деления вниз для канала В.
Из осциллограмм на рис. 8.14, б видно также, что выходной сигнал несколько меньше входного. Для измерения этой разницы зажим заземления осциллографа

GROUND, который по умолчанию подключается к общей шине (по этой причине такое подключение в большинстве случаев и не показывается), подключим к каналу В (см. рис. 8.15, а). Такое подключение позволяет измерить падение напряжения коммутируемого сигнала на исследуемом ключе. Результаты осциллографических измерений для этого случая показаны на рис. 8.15, б, откуда видно, что падение напряжения коммутируемого сигнала на ключе составляет около 170 мВ (двойная амплитуда), причем сигнал асимметричен примерно в соотношении 1:3, т.е. для отрицательного и положительного сигналов сопротивление ключа различно. Дополнительные исследования схемы на рис. 8.15, а показали, что падение коммутируемого сигнала на ключе и его асимметрия существенно зависят от напряжения отсечки полевого транзистора (параметр VTO в окне характеристик транзистора). После увеличения этого напряжения до -10 В для разностного сигнала были получены результаты, которые представлены на рис. 8.15, в, откуда видно, что падение коммутируемого сигнала на ключе уменьшилось до 72 мВ, а асимметрия — до 5 мВ, что в 13 раз меньше по сравнению с предыдущим случаем. Следовательно, для получения удовлетворительных результатов при разработке коммутатора аналоговых сигналов на базе полевого транзистора с управляющим р—n-переходом необходимо выбирать транзисторы с большим напряжением отсечки, что позволит получить более линейную передаточную характеристику.
МДП-ключи могут быть реализованы на МДП-транзисторах как с индуцированным, так и со встроенным каналом. Однако последний тип МДП-транзисторов нашел ограниченное применение на практике, поэтому дальнейшее рассмотрение проведем применительно к МДП-ключам с индуцированным каналом.
Отметим, что в статическом режиме входное сопротивление МДП-ключей достаточно большое (1012 Ом и более), а потребляемый от источника питания ток по сравнению с ранее рассмотренными ключами ничтожно мал (единицы микроампер). Однако на переменном токе потребляемая мощность существенно возрастает за счет перезаряда паразитных емкостей и на сравнительно высоких частотах достигает значений, характерных для биполярных транзисторов.

Базовые схемы МДП-ключей показаны на рис. 8.16. На рис. 8.16, а показана схема простейшего ключа на МДП-транзисторе с индуцированным каналом р-типа. Для отпирания транзисторов рассматриваемых схем на их затвор нужно подать отрицательное напряжение Ui, превышающее напряжение на остальных электродах на величину, большую порогового напряжения затвор-исток Ugsh, при котором и создается (индуцируется) токопроводящий канал, характеризующийся уменьшением сопротивления по мере увеличения (до предельно допустимого) напряжения затвор-исток U,„ когда сопротивление канала минимально. При этом в первом приближении можно пренебречь падением напряжения на транзисторе и считать, что потенциалы стока и истока у открытого транзистора приблизительно одинаковы.
Сопротивление индуцированного канала Ra. при заданных напряжениях Up, и Up,h определяется графически с помощью выходных характеристик или аналитически из приближенного выражения:

— удельная крутизна транзистора; е' — относительная диэлектрическая проницаемость диэлектрика между затвором и полупроводником; е — диэлектрическая проницаемость вакуума; M — подвижность носителей заряда; d — толщина диэлектрика под затвором; z — ширина канала; L — длина канала; U'dsh, — эквивалентное пороговое напряжение.
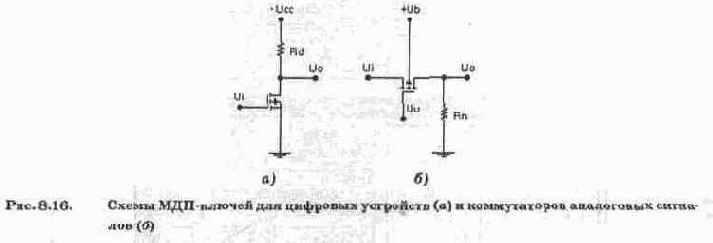
Типичное значение К°60 мкА/В, эквивалентное пороговому напряжению U'dsh. отличается от Udsh, вследствие того, что сопротивление канала Rd зависит также от напряжения на подложке Ц, в соответствии с выражением: U'dsh=Udsh+GUb, где G — коэффициент влияния подложки, равный отношению приращения напряжения Ug. к изменению напряжения на подложке Чь при постоянном токе стока. Для схемы на рис. 8.16, a U'dsh=Udsh. поскольку подложка соединена с истоком.
Следует заметить, что при интегральном выполнении ключа на рис. 8.16, а в качестве сопротивления нагрузки стока Rd используется МДП-транзистор, что позволяет существенно уменьшить занимаемую ключом площадь, поскольку резистор в интегральном исполнении занимает значительно большую площадь, чем транзистор.
МДП-ключ на рис. 8.16, б отличается от своего предшественника тем, что его входное (коммутируемое) напряжение в общем случае может быть разнополярным, однако для этого требуется специально сформированный сигнал управления. Анализ этого ключа показывает [48], что коэффициент передачи коммутируемого сигнала зависит от величины его напряжения. Для уменьшения погрешности, возникающей в результате наличия нелинейности коэффициента передачи, целесообразно увеличивать сопротивление нагрузки Rn.
Схема для исследования ключа по схеме рис. 8.16, а показана на рис. 8.17, а. Кроме МДП-ключа она содержит источник питания подложки +Ub и два источника управления +Uu и -Uu, которые поочередно подключаются к затвору транзистора с помощью переключателя Z. При подключении к затвору транзистора источника +Ub передача коммутируемых сигналов через ключ прекращается. Результаты моделирования схемы на рис. 8.17, а при указанных на ней значениях параметров показаны на рис. 8.17, б.
Для измерения падения коммутируемого напряжения на ключе подключим зажим заземления осциллографа ко входу канала В. Из результатов осциллографических измерений (рис. 8.17, в) видно, что падение напряжения на ключе составляет около 24 мВ, а асимметрия — 1 мВ, что заметно лучше по сравнению с ключом на полевом транзисторе.

Контрольные вопросы и задания
1. Если рассматривать транзисторный ключ как усилительное устройство, то к какому классу таких устройств его можно отнести по режиму работы?
2. В схеме ключа на рис. 8.11 установите напряжение питания 10В. Исследуйте зависимость падения напряжение на открытом ключе Ukn от тока коллектора при изменении сопротивления Rk от 10 кОм до 100 Ом. Напишите формулу для расчета коллекторного тока.
3. В схеме ключа на рис. 8.11 исследуйте зависимость напряжения на коллекторе транзистора при напряжении питания 10 В и коллекторном сопротивлении 100 Ом от коэффициента усиления тока транзистора В, который задается в окне его параметров. Напоминаем, что перед редактированием параметров компонента необходимо организовать отдельную библиотеку, а затем скопировать в нее модель интересующего Вас компонента.
4. С помощью схем на рис. 8.14, а и 8.15, а исследуйте зависимость выходного сигнала от управляющего напряжения (задается изменением напряжения питания Ucc).
5. Для схемы на рис. 8.15, а исследуйте зависимость падения напряжения на ключе коммутируемого сигнала и его асимметрии от напряжения отсечки полевого транзистора и амплитуды коммутируемого сигнала. При выполнении первой части задания придерживайтесь рекомендаций п. 3.
6. В схеме МДП-ключа на рис. 8.17, а установите предельные значения напряжений на подложке и затворе МДП-транзистора, обеспечивающих коммутацию однополярных и двухполярных сигналов.
7. С помощью схемы на рис. 8.17, а исследуйте зависимость падения напряжения на МДП-транзисторе коммутируемого сигнала от напряжения на подложке и затворе.
Устройство контроля четности
9.7. Устройство контроля четности
Операция контроля четности двоичных чисел позволяет повысить надежность передачи и обработки информации. Ее сущность заключается в суммировании по модулю 2 всех разрядов с целью выяснения четности числа, что позволяет выявить наиболее вероятную ошибку в одном из разрядов двоичной последовательности. Например, если при передаче кода 1001 произойдет сбой во втором разряде, то на приемном пункте получим код 1101 — такую ошибку определить в общем случае затруднительно. Если же код относится к двоично-десятичному (8-4-2-1), то ошибку легко обнаружить, поскольку полученный код (десятичный эквивалент — число 13) не может в принципе принадлежать к двоично-десятичному.
Обнаружение ошибок путем введения дополнительного бита четности происходит следующим образом. На передающей стороне передаваемый код анализируется и дополняется контрольным битом до четного или нечетного числа единиц в суммарном коде. Соответственно суммарный код называется четным или нечетным. В случае нечетного кода дополнительный бит формируется таким образом, чтобы сумма всех единиц в передаваемом коде, включая контрольный бит, была нечетной. При контроле четности все, естественно, наоборот. Например, в числе 0111 число единиц нечетно. Поэтому при контроле нечетности дополнительный бит должен быть нулем, а при контроле четности — единицей. На практике чаще всего используется контроль нечетности, поскольку он позволяет фиксировать полное пропадание информации (случай нулевого кода во всех информационных разрядах). На приемной стороне производится проверка кода четности. Если он правильный, то прием разрешается, в противном случае включается сигнализация ошибки или посылается передатчику запрос на повторную передачу.
Схема формирования бита четности [8] для четырехразрядного кода показана на рис. 9.25. Она содержит четыре элемента Исключающее ИЛИ, выполняющих функции сумматоров по модулю 2 (без переноса) и состоит из трех ступеней. На первой ступени попарно суммируются все биты исходного кода на входах А, В, С, D. На второй ступени анализируются сигналы первой ступени и устанавливается четность или нечетность суммы входного кода. На третьей ступени полученный результат сравнивается с контрольным сигналом на входе Е, задающим вид используемого контроля, в результате чего на выходе F формируется пятый дополнительный бит четности, сопровождающий информационный сигнал в канале передачи.



Результаты моделирования формирователя показаны на рис. 9.26 в виде таблицы истинности из 32 возможных двоичных комбинаций и булева выражения (из 32 комбинаций на рис. 9.26 видны только первые 16, остальные просматриваются с помощью линейки прокрутки). Для просмотра составляющих булева выражения необходимо мышью поместить курсор в дополнительный дисплей и передвигать его клавишами управления курсором.
В библиотеке программы EWB схема проверки на четность и нечетность представлена ИМС 74280 (аналог — К555ИП5), схема ее включения показана на рис. 9.27. ИМС 74280 имеет 9 входов (A, B...I) и два выхода (EVEN, ODD), один из которых — инверсный. Вход I используется для управления видом контроля (0 — контроль четности, 1 — контроль нечетности) и управляется переключателем Z (управляется с клавиатуры одноименной клавишей). Вывод NC — not connection — пустой, т.е. внутри ИМС к нему ничего не подключено.
Правильность функционирования схемы на рис. 9.27 проверяется с помощью генератора слова, при этом тип контроля (четности или нечетности) выбирается переключателем Z; на входы рассматриваемого устройства подаются различные двоичные комбинации; состояние выходов ИМС контролируется подключенными к ним светоиндикаторами (логическими пробниками).
Контрольные вопросы и задания
1. Какое назначение имеют формирователи кода четности, где они могут быть использованы?
2. Какая форма контроля четности чаще всего используется на практике, в частности, в Вашем компьютере, если в нем установлены модули ОЗУ с нечетным числом микросхем (см. разд. 5.12)?
3. Из представленных на экране логического преобразователя данных (рис. 9.26) выберите комбинации, относящиеся к контролю четности и нечетности, а также соответствующие им слагаемые булева выражения.
4. Проверьте правильность функционирования схемы на рис. 9.27, подавая на входы двоичные комбинации с генератора слова.
Устройство ввода-вывода для IBM PC
9.8. Устройство ввода-вывода для IBM PC
Использование микропроцессорной техники в системах автоматического управления в первую очередь связано с организацией ввода-вывода. Одним из наиболее распространенных способов ввода-вывода является программно-управляемый, при котором сопряжение с системной шиной управляющей ЭВМ осуществляется набором аппаратных средств, обеспечивающих селекцию устройств ввода-вывода (УВВ) и двухсторонний обмен информацией этих устройств с управляющей ЭВМ. В популярном персональном компьютере (ПК) фирмы IBM в адресном пространстве ввода-вывода зарезервировано 32 адреса (от ЗООН до 31FH) для возможности их использования при проведении различных экспериментов по применению ПК в качестве управляющей ЭВМ. Для таких целей различными фирмами, включая и фирму IBM [18], изготавливаются так называемые макетные платы с ножевым разъемом типа ISA (см. ниже), конструкция которых позволяет размещать на ней ИМС с различным количеством выводов и затем соединять их монтажными проводниками. Некоторые платы содержат буферные элементы, селекторы адреса и шинные формирователи.
Схема устройства ввода-вывода, позволяющего организовать двухстороннюю связь с 32-разрядным УВВ, приведена на рис. 9.28 [18]. Схема несколько изменена, поскольку в библиотеке программы EWB отсутствует микросхема шинного формирователя 74245, замененная подсхемой из двух ИМС 74244 (обозначена под номером 72245), в результате чего изменена и схема управления (логические элементы U1, U2). Второе отличие заключается в замене двух ИМС 74244, используемых в оригинале в качестве однонаправленных буферов, на одиночные буферные элементы U3...U17, что вызвано крайне неудачным расположением выводов ИМС 74244. Этот недостаток вообще характерен для всех цифровых ИМС из библиотеки EWB. Достаточно взглянуть на дешифраторы U23, U24 (отечественные аналоги К133ИДЗ, К1533ИДЗ и т.п.), где входы А, В, С, D, Gl, G2 расположены с правой стороны, тогда как общепринято располагать их слева. В других ИМС входы и выходы располагаются вперемежку с обеих сторон (в том числе и в 74244). Третье отличие заключается в замене 8-разрядного компаратора 74688, отсутствующего в библиотеке EWB, на комбинацию логических элементов U20, U21, U22.
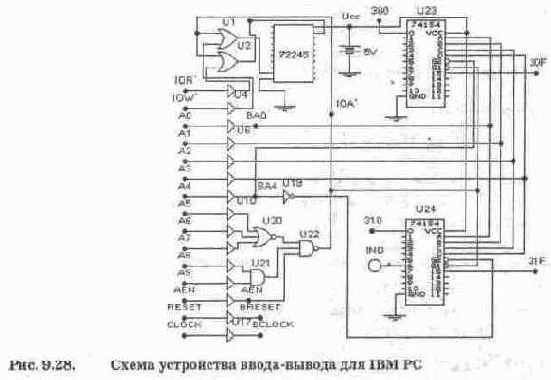

Схема подсхемы (субблока) 72245 показана на рис. 9.29. Подсхема 72245 может быть выполнена также на буферных элементах с тремя состояниями (см, рис. 9.16).
Назначение сигналов системной шины IBM PC следующее:
IOW\ IOR' — сигналы записи и чтения с активным низким уровнем для вывода и ввода при обмене с УВВ;
АО...А9 — сигналы адресной шины;
DO...D7 — сигналы шины данных (в подсхеме 72245). Во время цикла записи в УВВ микропроцессор выдает эти сигналы перед сигналом IOW', во время цикла чтения порт ввода должен обеспечить выдачу сигналов на шину данных перед сигналом IOR';
AEN — сигнал разрешения выбора адреса, вырабатывается контроллером прямого доступа к памяти (ПДП) материнской платы IBM PC; в течение цикла ПДП обращение к портам ввода-вывода запрещено, поскольку в это время возможна активизация сигналов IOW, IOR';
CLOCK (OSC) — системный тактовый сигнал синхронизации, используется по необходимости, на схеме рис. 5.8.1 не задействован;
RESET — сигнал установки всех функциональных узлов системы в исходное состояние после включения питания или нажатия кнопки Reset на системном блоке; синхронизируется импульсом OSC.
После передачи этих сигналов через буферные элементы к их имени добавляется префикс В, т.е. BIOW...BDO...BRESET. Сигнал IOA' — разрешение выбора адреса порта УВВ — формируется адресным селектором на ИМС U20, U21, U22 при разрешающем состоянии сигнала AEN, для которого активным является низкий уровень сигнала.
На выходах О...15 дешифраторов U23, U24 формируются адресные сигналы 32 портов ввода-вывода (от ЗООН до 31FH) с активным низким уровнем.
Для индикации состояния выходов в простейшем случае может быть использован светодиод IND (на схеме подключен только к одному выходу). Входы дешифраторов Gl, G2 разрешающие, при подаче на них сигналов низкого уровня (логического нуля) разрешается формирование сигнала на выходе дешифратора, определяемого двоичным кодом на адресных входах А, В, С, D.
Работа с УВВ на рис. 9.28 позволяет ознакомиться с аппаратными средствами программного ввода-вывода и отработать навыки по диагностике и локализации неисправностей цифровых систем управления. Приведем примерный перечень таких работ. 1. Исследование цепи формирования сигнала IOA' и выявление (локализация) имеющейся ошибки. Для этого на рабочее поле программы поместите иконку логического преобразователя и к его входам А, В... подключите сигналы А5...А9, AEN соответственно, а к выходу OUT — сигнал IOA' (выход микросхемы U22). Затем двойным щелчком мыши разверните логический преобразователь, последовательным нажатием кнопок

2. Исследование цепей формирования адресов УВВ. В правый верхний угол рабочего поля программы поместите иконку генератора слова и соедините его выходные клеммы-индикаторы, начиная с правого младшего разряда, со входами АО...А7. Проанализируйте адресное пространство в диапазоне ЗООН...31FH и установите требуемое значение сигналов на входах А8, А9 и AEN, после чего подключите к ним элементы заземления или источник +5V из библиотеки Passive, имитирующие источники логического нуля и единицы соответственно. После этого на экране генератора наберите несколько чередующихся комбинаций двоичных кодов, соответствующих адресу 316Н, и в пошаговом режиме, нажимая' клавишу STEP, проверьте факт формирования низкого активного уровня на вы-1 ходе дешифратора U24, к которому подключен индикатор IND; при правильно выбранной двоичной комбинации его свечение прекращается. Аналогичным образом проверяются все остальные выходы дешифраторов.
Подскажем, что для определения состояния сигналов на адресных входах А5...А9 в диапазоне адресов 300H...31FH необходимо преобразовать их шестнадца-теричный код в двоичный, заменяя каждую цифру тетрадой с весом разрядов 8-4-2-1, т.е. ЗООН=0011 0000 0000, 31FH=0011 0001 1111, откуда видно, что в указанном диапазоне адресов A9=A8=1 и А7=А6=А5=0 (отсчет адресов начинается с младшего, нулевого разряда). Следовательно, ко входам А8, А9 нужно подключить источник сигнала логической единицы (+5V), а ко входам А5, А6, А7 — заземление.
3. Исследование цепей управления шинным формирователем 72245. Для проверки правильности функционирования этого узла ко входам АО...А9 подключите источники сигналов логического нуля и логической единицы в комбинации, соответствующей адресу 316Н, а вход AEN заземлите, если не была исправлена ошибка в п. 1. При правильной коммутации после включения источника питания индикатор IND должен погаснуть. Для управления входами IOR', IOW воспользуйтесь источником напряжения с заданным внутренним сопротивлением из библиотеки Passive и переключателем из библиотеки Control, управляемого клавишей R (read — читать). Для источника питания необходимо правильно выбрать его ЭДС и внутреннее сопротивление с учетом параметров ИМС серии 155.
Подскажем, что схема имитации сигналов IOR'и IOW показана на рис. 9.30. В показанном на нем положении переключателя формируется сигнал записи (чтение запрещено, поскольку на входе IOR' — сигнал логической единицы, запрещающий такой режим). При нажатии на клавишу R формируется сигнал чтения из УВВ, подключенному по адресу 316Н, при этом запись запрещена по указанным выше причинам.
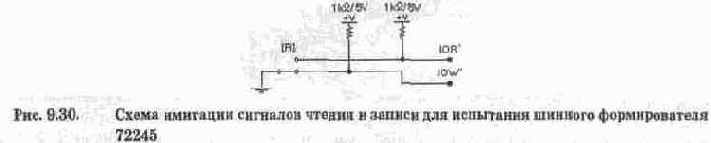
ЭДС источника напряжения для ИМС серии 155 выбирается равной 5 В, а его внутреннее сопротивление примерно равным выходному сопротивлению базового элемента серии 155.
Из рис. 9.29 видно, что входы управления G1' шинного формирователя 72245 (разрешение записи в УВВ) и G2' (разрешение чтения из УВВ) подключены к выходам двухвходовых логических элементов ИЛИ U1 и U2 соответственно, которые в реализуют функции двухвходовых элементов И для активных инверсных сигналов на входах, т.е.

Для проверки режима записи ко входам DO...D7 формирователя 72245 подключите генератор слова, а к двум его выходам, например BDO и BD7, индикаторы из библиотеки Indie. Задавая соответствующие комбинации восьмиразрядного кода на входе, на выбранных выходах будем наблюдать передачу сигналов через шинный формирователь на УВВ, подключенном по адресу 316Н..Для проверки режима чтения из УВВ генератор слова и индикаторы меняются местами, а переключатель R в схеме на рис. 9.30 переводится в режим формирования сигнала IOR\
Если одно УВВ работает только на прием информации (например, индикаторное устройство), а второе — только на передачу (например, опрос датчика), то они могут быть подключены к одному адресу, т.е. к одному выходу дешифратора U23 или U24, с помощью схемы на рис. 9.31, в которой расщепление адреса производится за счет селекции сигналами чтение-запись. Элементы ИЛИ U25, U26 работают аналогично U1, U2. На рис. 9.31 ADRi' — адресный сигнал с дешифратора U23 или U24, ADRRi' — адресный сигнал только передающего УВВ, ADRWi' — только принимающего.

Описанные выше сигналы системной шины IBM PC относятся к первой модели этих компьютеров — IBM PC XT. Архитектура системной шины такого компьютера называлась XT BUS и в настоящее время является составной частью более совершенных архитектурных решений. Поскольку IBM PC по существу является микроЭВМ, которую можно использовать в микропроцессорных системах управления, представляется целесообразным привести краткие сведения по существующим архитектурным решениям организации внутреннего интерфейса этих микроЭВМ, описания которых заимствованы из обзора [22], распространяемого по FIDO fileecho XHRDDOCS под именем emhwfaqs.zip.
XT-Bus — шина архитектуры XT — первая в семействе IBM PC. Относительно проста, поддерживает обмен 8-разрядными данными внутри 20-разрядного (1 Мбайт) адресного пространства (обозначается как "разрядность 8/20"), работает на частоте 4,77 МГц. Конструктив — 62-контактный разъем (слот).
ISA (Industry Standard Architecture — архитектура промышленного стандарта) — основная шина PC AT (другое название — AT-Bus). Является расширением XT-Bus, разрядность — 16/24 (16 Мбайт), тактовая частота — 8 МГц, предельная пропускная способность — 5,55 Мбайт/с. Разделение IRQ (аппаратные прерывания) невозможно. Допускается нестандартная организация Bus Mastering (УВВ с возможностью автономного управления системной шиной микропроцессорной системы), но для этого нужен запрограммированный 16-разрядный канал DMA (прямой доступ к памяти). Конструктив — 62-контактный разъем XT-Bus с прилегающим к нему 36-контактным разъемом расширения.
EISA (Enhanced ISA — расширенная ISA) — функциональное и конструктивное расширение ISA. Внешне разъемы имеют такой же вид, как и для ISA, и в них могут вставляться платы ISA, но в глубине разъема находятся дополнительные ряды контактов EISA, причем платы EISA имеют более высокую ножевую часть разъема с дополнительными рядами контактов. Разрядность — 32/32 (адресное пространство — 4 Гбайт), работает на частоте 8 МГц. Предельная пропускная способность — 32 Мбайт/с. Поддерживает Bus Mastering — режим управления шиной со стороны любого из устройств на шине, имеет систему арбитража для управления доступом устройств к шине, позволяет автоматически настраивать параметры устройств, возможно разделение каналов IRQ и DMA.
МСА (Micro Channel Architecture — микроканальная архитектура) — шина компьютеров PS/2 фирмы IBM. He совместима ни с одной другой шиной, разрядность — 32/32, (базовая — 8/24, остальные — в качестве расширений). Поддерживает Bus Mastering, имеет арбитраж и автоматическую конфигурацию, синхронная (жестко фиксированная) длительность цикла обмена, предельная пропускная способность — 40 Мбайт/с. Конструктив — 1...3-секционный разъем (такой же, как у VLB). Первая, основная, секция — 8-разрядная (90 контактов), вторая — 16-разрядное расширение (22 контакта), третья — 32-разрядное расширение (52 контакта). В основной секции предусмотрены линии для передачи звуковых сигналов. Дополнительно рядом с одним из разъемов может устанавливаться разъем видеорасширения (20 контактов). EISA и МСА во многом идентичны, появление EISA обусловлено собственностью IBM на архитектуру МСА.
VLB (VESA Local Bus — локальная шина стандарта VESA) — 32-разрядное дополнение к шине ISA. Конструктивно представляет собой дополнительный разъем (116-контактный, как у МСА) к разъему ISA. Разрядность — 32/32, тактовая частота — 25...50 МГц, предельная скорость обмена — 130 Мбайт/с; выполнена в виде расширения локальной шины процессора — большинство входных и выходных сигналов процессора передаются непосредственно VLB-платам без промежуточной буферизации. Из-за этого возрастает нагрузка на выходные каскады процессора, ухудшается качество сигналов на локальной шине и снижается надежность обмена по ней. Поэтому VLB имеет жесткое ограничение на количество устанавливаемых устройств:
при частоте на шине 33 МГц — три, 40 МГц — два, 50 МГц — одно, причем желательно — интегрированное (встроенное) в системную плату (обычно контроллеры портов и дисков).
PCI (Peripheral Component Interconnect — соединение внешних компонентов) — развитие VLB с приближением к EISA/MCA. Не совместима ни с какими другими, разрядность — 32/32 (расширенный вариант — 64/64), тактовая частота — до 33 МГц (PCI 2.1 — до 66 МГц), пропускная способность — до 132 Мбайт/с (264 Мбайт/с для 32/32 на 66 МГц и 528 Мбайт/с для 64/64 на 66 МГц), поддержка Bus Mastering и автоконфигурации. Количество разъемов шины на одном сегменте ограничено четырьмя. Сегментов может быть несколько, они соединяются друг с другом посредством мостов (bridge). Сегменты могут объединяться в различные топологии (дерево, звезда и т.п.). В настоящее время самая популярная шина, используется также на других компьютерах. Разъем похож на MCA/VLB, но чуть длиннее (124 контакта). 64-разрядный разъем имеет дополнительную 64-контактную секцию с собственным ключом. Все разъемы и карты к ним делятся на поддерживающие уровни напряжения питания 5 В, 3,3 В и универсальные; первые два типа должны соответствовать друг другу, универсальные карты вставляются в любой разъем.
Существует также расширение MediaBus, введенное фирмой Asustek и содержащее дополнительный разъем с сигналами шины ISA.
PCMCIA (Personal Computer Memory Card International Association — ассоциация производителей плат памяти для персональных компьютеров) — внешняя шина компьютеров класса NoteBook. Другое название модуля PCMCIA — PC Card. Предельно проста, разрядность — 16/26 (адресное пространство — 64 Мбайт), поддерживает автоконфигурацию, возможно подключение и отключение устройств в процессе работы компьютера. Конструктив — миниатюрный 68-контактный разъем. Контакты питания сделаны более длинными, что позволяет вставлять и вынимать карту при включенном питании компьютера. Аппаратное обеспечение внутреннего интерфейса выполняется с помощью набора микросхем — чипсетов.
Chip Set — набор микросхем (чипсет). Это одна или несколько микросхем, специально разработанных для "обвязки" микропроцессора. Они содержат в себе контроллеры прерываний, прямого доступа к памяти, таймеры, систему управления памятью и шиной — все те компоненты, которые в оригинальной IBM PC собраны на отдельных микросхемах. Обычно в одну из микросхем набора входят также часы реального времени с CMOS-памятью и иногда'— контроллер клавиатуры, однако эти блоки могут присутствовать и в виде отдельных чипов. В последних разработках в состав наборов микросхем для интегрированных плат стали включаться и контроллеры внешних устройств.
Внешне микросхемы чипсета выглядят, как самые большие после процессора, с количеством выводов от нескольких десятков до двух сотен. Название набора обычно происходит от маркировки основной микросхемы: OPT1495SLC, S1S471, UMC491, 182C437VX и т.п. При этом используется только код микросхемы внутри серии: например, полное наименование S1S471 — SiS85C471. В последних разработках используются и собственные имена; в ряде случаев это фирменное название (Neptun, Mercury, Triton, Viper) либо собственная маркировка чипов третьих фирм (ExpertChip, PC Chips).
Тип набора в основном определяет функциональные возможности платы: типы поддерживаемых процессоров, структура/объем кэша, возможные сочетания типов и объемов модулей памяти, поддержка режимов энергосбережения, возможность программной настройки параметров и т.п. На одном и том же наборе может выпускаться несколько моделей системных (материнских) плат, от простейших до довольно сложных с интегрированными контроллерами портов, дисков, видео и т.п.
Контрольные вопросы и задания
1. Можно ли рассматривать дисковод гибких дисков (дискет) как устройство ввода-вывода? Можно ли манипулятор мышь и клавиатуру также отнести к таким устройствам?
2. Что такое адресное пространство компьютера, как оно распределяется в персональном компьютере типа IBM PC XT?
3. Какова роль шинного формирователя в рассмотренном УВВ? Разработайте подсхему шинного формирователя на базе библиотечного элемента с тремя состоя-ниями (см. рис. 9.16).
4. Какие сигналы управления системной шины являются основными для схемы УВВ на рис. 9.28?
5. Проведите все рекомендованные исследования для УВВ на рис. 9.28.
6. Учитывая стремление разработчиков и изготовителей IBM PC обеспечить их совместимость снизу вверх, можно ли утверждать, что рассмотренное УВВ будет работать в последних модификациях компьютеров?
7. Шины какого типа используются в последних модификациях IBM PC?
Согласно данным фирмы Interactive Image
Согласно данным фирмы Interactive Image Technologies программа Electronics Workbench в настоящее время насчитывает около 85 тыс. зарегистрированных пользователей. Судя по рекламным листкам и каталогам, распространяемых компанией "Софт Лайн" (дистрибьютором Electronics Workbench в странах СНГ), основными пользователями программы являются средние и высшие учебные заведения. Об этом говорит и тот факт, что наряду с самой программой в прайс-листе фирмы содержится обширный список учебных пособий, созданных на базе EWB. Пока в списке нет пособия по использованию пакета EWB Layout, поскольку это достаточно новая разработка. В процессе знакомства с программой и примерами ее многочисленных применений можно убедиться, что весьма удобный пользовательский интерфейс EWB действительно являются серьезной предпосылкой для использования ее в учебных целях в качестве лабораторного практикума по таким предметам, как физика (электричество), основы электротехники и электроники, основы вычислительной техники и автоматики. Практика использования программы в таком качестве показала, что достаточно двух-трех часов предварительной подготовки, чтобы учащийся (студент), имеющий опыт работы в среде Windows, мог приступить к самостоятельной работе.
К другому контингенту пользователей EWB относятся радиолюбители и инженеры-разработчики, не имеющие специальной подготовки по автоматизированному проектированию радиоэлектронных устройств. К таким пользователям можно отнести также и высококвалифицированных специалистов старшего поколения, у которых первое столкновение с пакетом типа P-CAD вызывает своеобразную аллергию отторжения и неприятия. Для такого круга пользователей программа EWB явится достаточно привлекательным инструментом для оперативного решения схемотехнических задач на этапе эскизного проектирования при проведении макетирования (физического моделирования) отдельных элементов и узлов. На последующих (более серьезных) этапах разработки, когда возможности EWB будут исчерпаны, у разработчика появится естественная (уже безбоязненная) надобность обратиться к более мощным пакетам проектирования [2, З]. Таким образом, EWB явится своеобразным мостиком для преодоления психологического барьера в освоении более сложных профессиональных программ. Дополнительным катализатором является предусмотренные в EWB возможности импортирования созданных в ее среде электрических схем в формат PSpice, OrCAD и других программ.
Говоря об ограниченных возможностях программы EWB по сравнению с PSpice [I, 2], имеются в виду следующие обстоятельства: ограничения в определении исходных данных для проведения расчетов, например, при статистических испытаниях; недостаточная по объему библиотека компонентов; отсутствие средств синтеза аналоговых устройств и ограниченные возможности синтеза цифровых устройств (например, невозможность синтеза программируемых логических матриц, включая и простейшие программируемые ПЗУ); ограничения по текстовому оформлению схем, в том числе отсутствие шрифтов кириллицы и средств редактирования графических изображений компонентов; невозможность создания законченной технической документации; отсутствие описания используемых в программе алгоритмов расчетов, что затрудняет осознанное задание многочисленных параметров и оценку возможностей программы.
